






Andrzej Wełyczko
Na tym etapie realizacji procedury projektowej można rozpocząć poszukiwanie rozwiązania optymalnego, czyli uruchomić polecenie Compute Shape (Rys. 13). Proces poszukiwania rozwiązania optymalnego jest iteracyjny i może trwać od kilku minut do kilkunastu godzin, w zależności od tego, jak bardzo złożona jest definicja samego zadania, jaka licencja jest dostępna oraz jakie zasoby (liczba procesorów) są do dyspozycji.
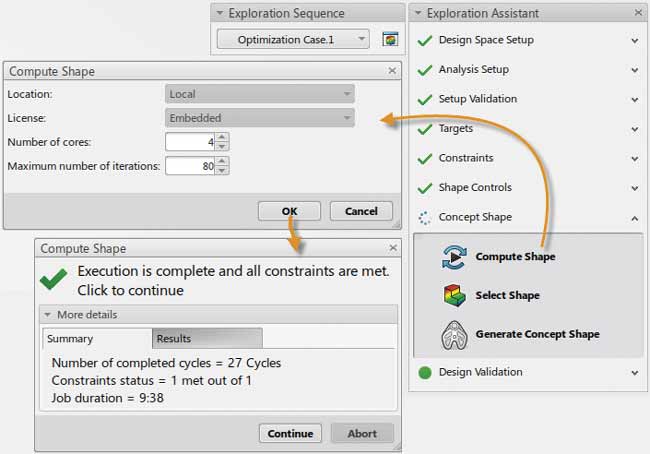
Rys. 13
Wyniki obliczeń są dostępne po uruchomieniu polecenia Select Shape (Rys. 14).
Rys. 14
Użyłem liczby mnogiej (wyniki), bo dla różnych wartości parametru Iso-value (patrz: okno View cuts) dostępne są różne rozwiązania (Rys. 15).
Rys. 15
Zadaniem konstruktora jest wybór jednego lub kilku rozwiązań, które będą w dalszej kolejności analizowane.
Wynik optymalizacji topologicznej jest siatką MES, która w celu ostatecznej weryfikacji kształtu musi być zamieniona na dokładną reprezentację geometryczną. W tym celu należy uruchomić polecenie Generate Concept Shape (Rys. 16), które automatycznie generuje zestaw powierzchni (tu: Splitting surfaces.1) wymaganych do zdefiniowania koncepcyjnego modelu bryłowego (tu: Concept shape.1).
Rys. 16
Struktura takiego modelu bryłowego nie jest zbyt skomplikowana (Rys. 17):
A→ Add.1 – przestrzeń projektowa (Design Space) bez obszarów zdefiniowanych za pomocą polecenia Partition Design Space,
A→ Split.1 – odcięcie bryły A za pomocą powierzchni zdefiniowanej na podstawie siatki MES wybranego rozwiązania optymalnego,
B→ Add.2 – dodana przestrzeń zarezerwowana na otwór centralny Solid Partition.2,
C→ Add.3,... , Add.7 – dodane przestrzenie zarezerwowane Solid Partition.3,... , Solid Partition.7.
Rys. 17
Bryła, którą system proponuje, jest tylko koncepcją optymalnego modelu bryłowego projektowanej części i dlatego jej kształt powinien być zweryfikowany. Dzięki opisanej wcześniej strukturze modelu Sim_WA4_Joiner_Variant0 system automatycznie zastosuje zadane w punkcie Analysis Setup obciążenia i warunki brzegowe do wykonania analizy Validate Shape (Rys. 18) dla aktualnej geometrii projektowanej części, czyli bryły Concept shape.1.
Rys. 18
Jedyne co można zmienić na tym etapie to dokładność siatki MES (FEM of Shape Validation.1), na podstawie której wykonane będą obliczenia. Lista dostępnych wyników obliczeń dla Shape Validation.1 jest dostępna w oknie Plots (Rys. 19).
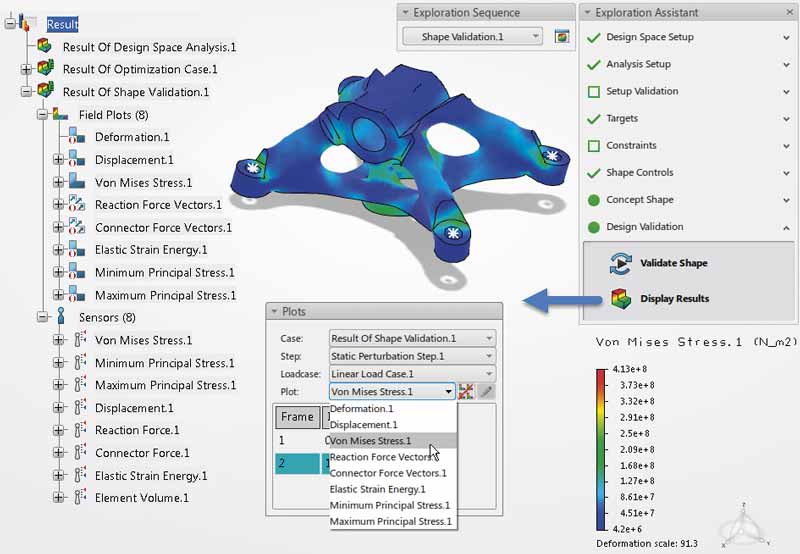
Rys. 19
W podobny sposób, dla tych samych obciążeń i warunków brzegowych, ale różnych wartości współczynnika Iso-value lub innych ograniczeń (Constraints i/lub Shape Controls), można zdefiniować kolejne warianty projektowe (Rys. 20) oraz porównać nie tylko ich kształt, ale także masę, objętość, parametry wytrzymałościowe oraz odkształcenia. Dzięki takiemu porównaniu łatwiej jest wybrać wariant najlepszy, czyli optymalny.
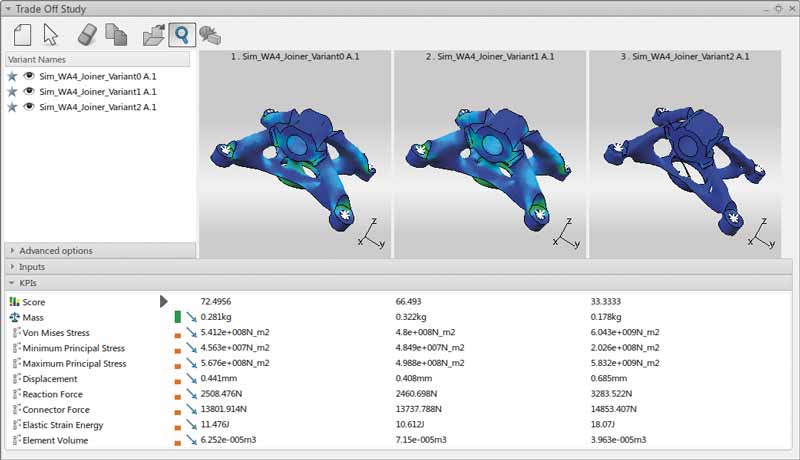
Rys. 20
Ostatnim etapem takiego procesu projektowego jest rekonstrukcja powierzchni, która jest wynikiem optymalizacji topologicznej. Dlaczego? Powierzchnia zdefiniowana automatycznie po wykonaniu polecenia Generate Concept Shape (na rysunku 21 są to dwie powierzchnie: Subdivision Surface.1 i Subdivision Surface.2, połączone w jeden logiczny obiekt: Join.1) jest jedynie propozycją koncepcji kształtu i nie jest idealna, bo algorytm definiujący tę powierzchnię wykonuje jej rekonstrukcję na podstawie przybliżonej definicji w postaci siatki MES.
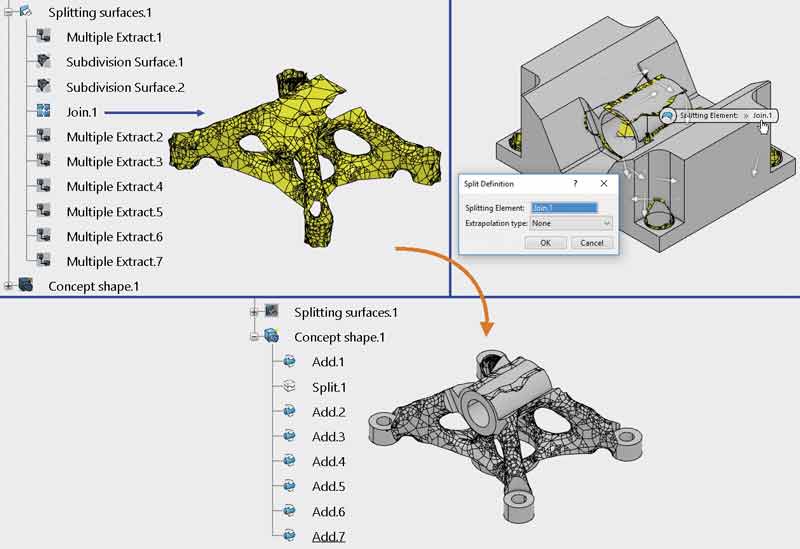
Rys. 21
Użytkownicy rozwiązań z grupy Reverse Engineering systemu CATIA V5 zapewne znają polecenie Automatic Surface dostępne w środowisku Quick Surface Reconstruction. Podobny algorytm został zastosowany w przypadku polecenia Generate Concept Shape. Już w nazwie tego polecenia pojawia się słowo Concept, które sugeruje, że nie jest to model finalny. Kształt powierzchni koncepcyjnej jest związany z wielkością elementów siatki (im mniejsze elementy tym gładsza powierzchnia), ale trzeba pamiętać, że im mniejsza wielkość elementów siatki, tym dłuższy jest czas obliczeń. Jakość tej powierzchni przekłada się oczywiście na jakość bryły Concept shape.1 i dlatego rekonstrukcja, której celem jest uproszczenie i wygładzenie powierzchni, jest konieczna.
- start
- Poprzedni artykuł
- 1
- 2
- Następny artykuł
- koniec