W poprzednich artykułach niniejszego cyklu opisano cele i oczekiwania postawione przy projektowaniu nowego rodzaju mechanizmów różnicowych, przedstawiono także zestawienia zaprojektowanych, wykonanych i przebadanych prototypów. Niektóre z nich, najbardziej charakterystyczne i znaczące, są bliżej opisane w tym artykule.
Jan Dzida
Mechanizm różnicowy MR.04.a o tarciu wewnętrznym sterowanym stosunkiem prędkości kątowych ω1/ω0
Mechanizm ten powstał w wyniku rozwoju kilku wcześniejszych wariantów konstrukcyjnych, działających na podobnej zasadzie. Należy on do pierwszych rozwiązań realizujących ideę zintegrowania funkcji prostego symetrycznego mechanizmu różnicowego i zaawansowanego systemu sterowania jego pracą, poprzez zmianę wartości momentu tarcia wewnętrznego. Rysunek 1a przedstawia przekrój osiowy, a 1b – widok mechanizmu różnicowego MR.04.a w wersji przeznaczonej do tylnych mostów samochodów użytkowych i terenowych o masie całkowitej do 3,0 t. 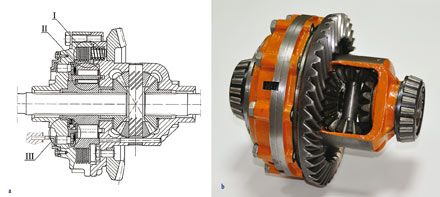
Rys. 1 Mechanizm różnicowy typu MR.04.a o momencie tarcia sterowanym parametrem ω1/ω0;
a – przekrój (I – wielotarczowe sprzęgło cierne, II – sprzęgło wałkowe, III – elementy czujnika stosunku prędkości kątowych), b – widok
Na rysunku 1a zaznaczone są trzy grupy elementów tworzących zasadnicze podzespoły mechanizmu, generujące dodatkowy moment tarcia: wielotarczowe sprzęgło cierne (I), sprzęgło wałkowe (II) i mechaniczny czujnik stosunku prędkości kątowych (III). Przyjęty podział elementów ma charakter umowny, gdyż niektóre z nich równocześnie realizują odpowiednie funkcje w dwóch podzespołach. Sprzęgło wielotarczowe (I), generujące moment tarcia wewnętrznego, składa się z pakietu tarcz wewnętrznych i zewnętrznych, naciskanych osiowo sprężynami walcowymi. Piasta wewnętrzna tego sprzęgła stanowi równocześnie pierścień zewnętrzny sprzęgła wałkowego (II). Włączenie momentu tarcia wewnętrznego w mechanizmie następuje wtedy, gdy sprzęgło wałkowe ulegnie zakleszczeniu, co powoduje połączenie tulei wielokątnej osadzonej na półosi z obudową mechanizmu różnicowego poprzez sprzęgło cierne. Stan taki wystąpi na skutek zadziałaniem czujnika stosunku prędkości kątowych, gdy zostanie osiągnięta jedna z granicznych wartości (ω1/ω0)gran1 lub (ω1/ω0)gran2. Jak już wcześniej zostało wykazane, stosunek prędkości kątowych ω1/ω0 w pewnym stopniu określa stan współpracy kół napędowych mostu z podłożem. Wynika stąd, że opracowanie mechanicznego czujnika o funkcji kontrolowania wartości parametru ω1/ω0 było podstawowym problemem przy projektowaniu tego mechanizmu. Ponieważ założono, że czujnik powinien prawidłowo działać w dużym zakresie prędkości jazdy, w tym zwłaszcza przy wartościach małych i bliskich zeru, spowodowało to odrzucenie oparcia jego zasady działania, np. na porównywaniu sił odśrodkowych. Konieczne było opracowanie zupełnie nowej koncepcji budowy i działania takiego czujnika.
cały artykuł dostępny jest w wydaniu 10 (61) Październik 2012



25 kwietnia 2024




Mechanizmy różnicowe Polskie – prace badawczo-rozwojowe, cz. III




Specjalistyczny portal inżynierski dla osób zaangażowanych w tworzenie produktów – maszyn, urządzeń, mechanizmów, podzespołów, części, elementów itd. – od koncepcji do ostatecznego wykonania.