






Strona 2 z 4
Na podstawie badań wstępnych prototypu utworzono model 3D w środowisku programu Siemens NX. W szczególności interesujące było wymuszenie i obserwacja zjawiska utraty kontaktu z podłożem przedniego wewnętrznego koła w czasie przyspieszania na łuku drogi. Badania te zostały przeprowadzone przy użyciu programu modułu Motion Simulation oraz MSC.ADAMS.
Ze względu na poziom zaawansowania modelu postanowiono zastosować pewne uproszczenia i uogólnienia. Postanowiono wyeliminować zawieszenie kół i wprowadzić jedynie trzy promienie skrętu dla uproszczenia postaci konstrukcyjnej. Założono, że łączne odkształcenie ogumienia i płyty nadwozia odwzorowują sprężystość zawieszenia pojazdu w zakresie zjawiska odciążania przedniego wewnętrznego koła w czasie jazdy po łuku. Priorytetem rozwiązania konstrukcyjnego ostatecznego modelu była taka jego budowa, która umożliwia zmiany dystrybucji siły napędowej, w sposób odpowiadający krzyżowemu lub klasycznemu układowi napędowemu. Na rysunku 4 przedstawiono widok modelu wirtualnego, który w dalszym toku badania posłużył do budowy rzeczywistego pojazdu mechatronicznego, przedstawionego na rysunku 5.
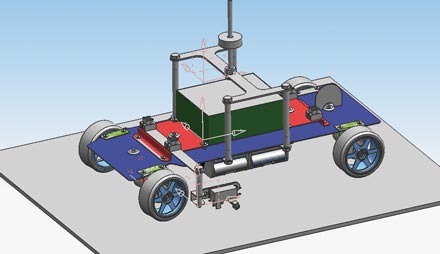
Rys. 4 Widok modelu pojazdu badawczego

Rys. 5 Mechatroniczny pojazd badawczy. Pojazd posiada cztery silniki elektryczne napędzające cztery koła. Rozwiązanie to umożliwia symulowanie zarówno tradycyjnego, jak i krzyżowego układu napędowego.

Rys. 4 Widok modelu pojazdu badawczego

Rys. 5 Mechatroniczny pojazd badawczy. Pojazd posiada cztery silniki elektryczne napędzające cztery koła. Rozwiązanie to umożliwia symulowanie zarówno tradycyjnego, jak i krzyżowego układu napędowego.
Po wybraniu elementów, pomiędzy którymi zachodzi bezpośredni kontakt, zdefiniowano następujące parametry:
- współczynnik przyczepności przylgowej (Static Coefficient),
- współczynnik przyczepności poślizgowej (Dynamic Coefficient)
Tabela 1 Współczynniki przyczepności poślizgowej
Podczas jazdy po okręgu każde koło ma do przebycia inną drogę. Uwidocznione jest to na rysunku 6 przedstawiającym kinematykę skrętu.

Rys. 6 Kinematyka skrętu samochodu Symulacja
Symulowany napęd krzyżowy jest odmianą napędu na wszystkie koła, w którym podczas pokonywania łuku część mocy jest przenoszona z lewego przedniego koła na prawe tylne. Napęd krzyżowy jest włączony w czwartej sekundzie ruchu, na pół sekundy (droga pomiędzy punktami t1 i t2 (Rys. 7).
Rys. 7 Widok toru ruchu pojazdu z udziałem napędu krzyżowego. Teoretyczny tor jazdy bez znoszenia zaznaczono linią niebieska przerywaną