






Nad mikroskopijnymi miękkimi robotami pracuje wielu robotyków. Urządzenia te znajdują wiele zastosowań, jednak najbardziej obiecującą rolę mogą odegrać w medycynie. Mikroskopijny miękki robot może przenosić np. dawki leku arteriami układu krwionośnego. Podczas gdy uzyskanie miękkich polimerów pozwalających zbudować takiego robota nie sprawia już większych trudności, to ciągle problem stanowi mechanika poruszania.
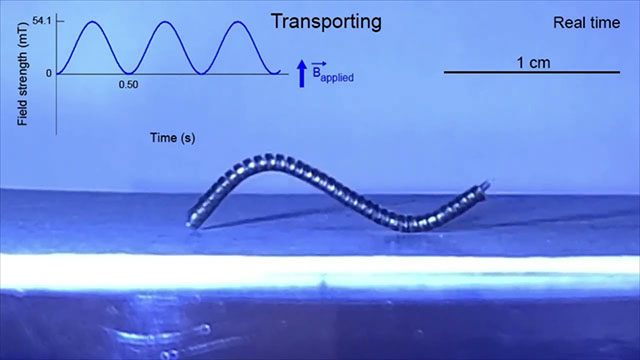
Naukowcy z Massachusetts Institute of Technology rozwiązali ten problem stosując pole magnetyczne. O ile eksperymenty z polami magnetycznymi stosowanymi do napędu miękkich robotów nie są niczym nowym, to rozwiązanie zespołu kierowanego przez prof. Polinę Ankeevę wydaje się proste i niezawodne. Dotąd ruchy wywoływał magnes wzbudzający zmienne pola magnetyczne i poruszający się razem z robotem. W MIT zastosowano jednowymiarowe pole magnetyczne. Roboty aktywowane są polem magnetycznym prostopadłym do kierunku ruchu. Urządzenie zbudowane zostało z dwóch rodzajów gumy o różnej sztywności. Wewnątrz, poprzez kanał pomiędzy gumami przechodzą spiralne włókna. Wystarczyło ustalić jak operować polem magnetycznym aby wzbudzić pożądaną sekwencję ruchu. Taki napęd może zostać wykorzystany nie tylko do transportu, lecz również do budowy sztucznych mięśni.
news.mit.edu