
































Pod względem wytrzymałości doraźnej korpusy wykazują zawsze duży zapas bezpieczeństwa, ponieważ najczęściej podstawowym warunkiem decydującym o ich cechach i wymiarach jest sztywność. Zwłaszcza dotyczy to obrabiarek.
Naprężenia wywołane obciążeniami podczas pracy w żeliwnych korpusach obrabiarek średnich nie przekraczają zwykle 60 – 80 kG/cm2, a w korpusach obrabiarek pracujących przy dużych siłach skrawania, jak np. obróbka zgrubna, osiągają 100-200 kG/cm2. W korpusach stalowych, spawanych występują naprężenia na ogół nieprzekraczające 150-200 kG/cm2.
Obciążenia korpusów należy rozpatrywać w całym układzie nośnym obrabiarki. Jest on poddany działaniu sił i momentów skrawania, ciężarów przedmiotów obrabianych, ciężarów własnych elementów korpusów i zespołów, sił zacisków wywieranych przez szczęki uchwytów, sił bezwładności oraz reakcji fundamentu powodowanego działaniem sił ciężkości, sił dynamicznych powodowanych drganiami oraz ugięciami podstawy (momenty reakcyjne utwierdzenia). Pozostałe siły tworzą układy zamykające się wewnątrz konstrukcji nośnej obrabiarki. Występuje tu takie pojęcie jak obwód przenoszenia sił skrawania przez korpusy tworzące układ nośny. Odpowiednia analiza obciążeń układu nośnego i poszczególnych korpusów pozwala wyciągnąć ważne wnioski dla ich konstrukcji. Istotne są te obciążenia, które powodują odkształcenia wywierające dominujący wpływ na błędy obróbki.

W korpusach przyrządów spawalniczych mogą występować podobne układy sił i obwody sił. Nie ma tu co prawda sił skrawania, występują jednak siły i odkształcenia od naprężeń i odkształceń spawalniczych, spawanych w nich zespołów. Niekiedy mogą one być znaczne. Zdarza się, że duża rama spawana w przyrządzie kurczy się o kilkanaście, a w skrajnym przypadku o kilkadziesiąt milimetrów, jeżeli długość ramy np. podwozia wynosi 20000-25000 mm. Przykładem może być rama podwozia lokomotywy Kiruna, która jako ciężka lokomotywa wykonywana była z grubych blach (niektóre elementy z blach o grubości nawet 40 mm). Im grubsze blachy zespołu spawanego w przyrządzie, tym większe odkształcenia i skurcze spawalnicze. Całe nadwozie lokomotywy Kiruna po zespawaniu wygięło się w górę, na kształt łuku, tak, że czołownice były o 70 mm wyżej od wymiaru nominalnego.

Można sobie tylko wyobrazić jakie przy tym występowały siły. Przeciwdziała się takim odkształceniom nadając przed spawaniem tzw. strzałkę ugięcia. Jest to osobna, skomplikowana technologia wraz z odpowiednią teorią i praktyką stosowaną w fabrykach lokomotyw, tu nie omówiona. Można tylko zaznaczyć, że siły powodujące strzałkę ugięcia wagonu lub lokomotywy są rzędu 10-20 Mg. Obciążają one przyrząd spawalniczy i nie można ich nie uwzględniać konstruując przyrząd. Z kolei przeciwdziałanie siłom od odkształcenia spawalniczego, polegającego na skróceniu ramy podczas spawania, polega na takim doborze baz oraz technologii spawania np. ramy podwozia, aby odkształcenia powodowały odsuwanie się elementów spawanej ramy od baz przyrządu. W przeciwnym razie może dojść do zakleszczenia spawanego korpusu w przyrządzie lub w skrajnym przypadku do zniszczenia przyrządu.
Wymiarowanie korpusów
Wykonywanie korpusów obrabiarek, ale często także i przyrządów, odbywa się na gotowo. Nie ma tu miejsca na ustawianie i dopasowywanie w montażu. Wynika to stąd, że decydujące znaczenie ma założona konstrukcyjnie dokładność obrabiarki. Standardowo, uniwersalna tokarka czy frezarka powinna wykazywać błąd wykonania kompletnej obrabiarki w granicach +/- 0,01 mm. Dotyczy to sumy błędów ustawienia wrzeciona: bicie, współosiowość, prostopadłość do płaszczyzny stołu, dokładności posuwów itd. Zagadnienie dokładności obrabiarki (maszyny) jest dość skomplikowane same w sobie i tu jest jedynie zasygnalizowane. Są specjalne procedury i karty pomiarowe do sprawdzania tych tolerancji. Przy niektórych obrabiarkach, jak np. dokładne szlifierki, wytaczarki, czy koordynatki, tolerancje te są w granicach nawet 0,001 mm. Innym, równie ważnym w wykonywaniu obrabiarek parametrem wywołującym ostre tolerancje jest np. współpraca kół zębatych. Odległość współpracujących kół zębatych przy przeciętnych dokładnościach powinna mieścić się w granicach od +/- 0,01 do 0,025 mm. Przy dokładnych przekładniach zębatych, np. przy dużych obrotach lub wymaganiach dotyczących hałasu, tolerancje te mogą być liczone w tysięcznych częściach milimetra. Odpowiednio dochodzi tu współosiowość, prostopadłość i inne tolerancje geometryczne. Wpływa to na dokładność wykonania korpusu przekładni zębatej.
Uzyskanie takich tolerancji jest możliwe, zarówno w przemyśle obrabiarkowym, jak i w narzędziowniach wykonujących różne przyrządy obróbcze jak np. wykrojniki, tłoczniki, ale i przyrządy do frezowania czy toczenia. Dotyczyć to może też przyrządów do zgrzewania niektórych części nadwozi. Wymaga to jednak gruntownej analizy wymiarowania (i analizy tolerancji) całej maszyny, jak i poszczególnych jej elementów. Analizę taką powinno rozpoczynać się od końca, czyli od założonej dokładności obrabiarki, czy przyrządu, cofając się, poprzez zespoły do poszczególnych detali, przy analizowaniu również tolerancji ustalenia tych zespołów pomiędzy sobą. Gdyby rozpocząć od obrabianego na obrabiarce detalu, to należy rozpatrzyć układ OPN (Obrabiarka – Przyrząd – Narzędzie). W przybliżeniu można by powiedzieć, że każdy wymieniony element OPN odbiera 1/3 dokładności detalu. W szczegółowych obliczeniach mogłoby to wyglądać w różnych przypadkach nieco inaczej, jednak w zdecydowanej większości przypadków to się sprawdza. Wynika stąd, że jeżeli detal obrabiany na obrabiarce ma mieć dokładność przykładowo 0,1 mm (np. położenie i wymiar otworu) to obrabiarka powinna zapewniać dokładność 0,03 mm, przyrząd 0,03 mm i narzędzie też 0,03 mm. Najczęściej jednak wymagania wobec układu OPN są ostrzejsze. Przy tokarce należałoby przeanalizować współosiowość wrzeciona i konika, a więc też i łoża tokarki, wykonanie otworu pod wrzeciono, łożyskowanie wrzeciona łożyskami serii NN z systemem kasowania luzów i wpływem temperatury na dokładność (specjalna, osobna procedura projektowania i montażu takiego łożyskowania). Często dopiero po godzinie pracy, lub dłuższym czasie, stabilizują się luzy wrzeciona, po osiągnięciu odpowiedniej temperatury węzła łożyskowego, umożliwiającej dokładną obróbkę. Łoże, a w nim prowadnice, wykonywane są dokładnym szlifowaniem i bardzo często tzw. skrobaniem na tusz, gdzie do tuszowania używa się specjalnych sprawdzianów i przeciwsprawdzianów. Przeanalizować trzeba też wpływ sił skrawania na sztywność korpusu. Konstrukcja prowadnic i suportu musi zapewniać odpowiednią sztywność dla zachowania dokładności obrabiarki. W tokarce przyrządem jest uchwyt samocentrujący, który musi być odpowiednio dokładny, a jego mocowanie na wrzecionie odpowiednio pewne. Narzędzie również powinno mieścić się w wyliczonej tolerancji. W układzie OPN może wystąpić szereg innych kombinacji, zwłaszcza jeżeli obrabiarka jest skomplikowana lub obrabiany detal jest bardzo dokładny, jednak zasada jest podobna.
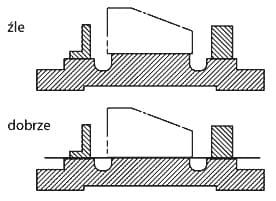
Wymiarowanie korpusów ma ścisły związek z podanym wyżej rozumowaniem i z technologią wykonywania korpusów, a zwłaszcza z wierceniem, rozwiercaniem i wytaczaniem otworów na dokładnych frezarko-wiertarkach, wytaczarkach, czy wiertarkach współrzędnościowych. Konstruktor korpusu najlepiej zdaje sobie sprawę z wymaganych dokładności, jakie korpus powinien spełniać. W obrabiarkach wynikają one z samej dokładności obrabiarki (można wyobrazić sobie konstruowaną obrabiarkę, która ma wykonywać detale w np. 4, 5 lub 6 klasie dokładności), a także z wymagań związanych z poprawną pracą pewnych mechanizmów, jak np. przekładnie zębate, które zwłaszcza przy dużych obrotach wałków i kół zębatych są bardzo ostre. Dotyczy to współosiowości, dokładności otworów pod łożyska, ich prostopadłości, położenia osi otworów itd. Podobnie w przyrządach, których ostateczna dokładność w bazie stykającej się z detalem wykonywanym jest wynikiem sumy wielu błędów tolerancji czy to wykonawczych, czy też montażowych i pomiarowych. Nie wystarczy powiedzieć, że chcemy aby korpus był wykonany dokładnie. Trzeba wiedzieć jak to zrobić, żeby korpus był dokładnie wykonany. Informacje narzucające pewien sposób wykonania korpusu, po wnikliwej analizie, powinny zostać zamieszczone na rysunku przez konstruktora. Powinien on, poprzez np. odpowiednie zwymiarowanie i „ustawienie” tolerancji, narzucić sposób wykonania korpusu. Technolog czy programista CNC ma najczęściej przed sobą pojedynczy rysunek korpusu i w zasadzie nie zastanawia się dlaczego otwory mają taką, a nie inną dokładność, i czy np. muszą być współosiowe w tolerancji 0,01 mm. Chociaż oczywiście zdarza się, że dobry technolog stara się zrozumieć ideę konstruktora i zapoznaje się z dokumentacją całej maszyny. Niezależnie od tego, jaką technologię wykonania korpusu przyjmiemy, zawsze w pierwszej kolejności należy obrobić powierzchnię, która służy do położenia korpusu na stole maszyny lub też do zabazowania np. na kątowniku obrabiarki w przypadku obróbki dużych ram. Często jest to tylko zabielenie w 3 klasie chropowatości, tak aby uzyskać jednolitą powierzchnię bazową. Niekiedy może to być wyższa klasa chropowatości, np. 6, jeżeli jest to powierzchnia wykorzystywana później w montażu do połączenia z innym korpusem. Powierzchnia ta powinna być ustalona przez konstruktora korpusu. Od niej, jako bazowej, odnosi się odchyłki dokładności geometrycznej otworów i innych ważnych płaszczyzn.

Dawniej, kiedy nie było obrabiarek NC i CNC, otwory pod wrzeciona, wałki i kołki wykonywało się poprzez ręczne naprowadzanie wrzeciona, za pomocą odpowiednich pokręteł obrabiarki, w żądaną oś. Najpierw nawiercało się otwór, potem wierciło, a na końcu wytaczało lub rozwiercało otwór na gotowo, stosując niekiedy wiele przejść, aż do uzyskania wymaganej tolerancji, np. pod łożysko, przeważnie w 6 lub 7 klasie dokładności. W niektórych fabrykach wykonuje się korpusy w taki sposób i dzisiaj. W dobie obrabiarek NC i CNC pozycjonowanie wrzeciona obrabiarki w osi obrabianego korpusu dokonywane jest z pulpitu obrabiarki lub z programu. Jest to znacznie dokładniejsze i powoduje mniej pomyłek operatora oraz znacznie przyspiesza czas wykonania korpusu. W wielu fabrykach, w których wykonuje się dużą liczbę korpusów, oszczędza się na zakupie drogich obrabiarek CNC i po nawierceniu lub owierceniu otworów na pojedynczej obrabiarce NC lub CNC, gdzie osie otworów zostały ustalone, przekazuje się korpus na obrabiarki z ustawianiem tradycyjnym – ręcznym i na nich wykonuje się dokładną obróbkę poszczególnych otworów na gotowo, centrując się w osiach nawierconych otworów. Można oczywiście wykonać kompletne otwory także na obrabiarkach CNC, zwłaszcza gdy są one wyposażone w magazyny narzędzi. Mimo że jest to droższe wykonanie (drogi czas pracy maszyny), to obecnie w wielu fabrykach tak właśnie wykonuje się korpusy. Jednak każde ustawianie korpusu i odnoszenie współrzędnych osi otworów, niezależnie od dysponowanej obrabiarki i sposobu wykonania na niej korpusu, wymaga wytypowania pewnych punktów odniesienia całego układu pomiarowego. Najczęściej punkt ten stanowią dwie prostopadłe płaszczyzny korpusu, np. bok i dół w widoku korpusu z góry, które obrabia się na wiertarko-frezarce, czy wytaczarce, najczęściej tej samej, na której później wykonuje się otwory i w tym samym zamocowaniu. Płaszczyzny te znajdują się w osi X i osi Y. Jeżeli jest potrzebna jeszcze płaszczyzna odniesienia w osi Z, to stanowi ją wtedy płaszczyzna czołowa korpusu lub powierzchnia przylgowa do połączenia z innym korpusem. Na przecięciu osi X i Y rysuje się punkt odniesienia, oznaczany poprzez zaczernienie dwóch ćwiartek naprzeciwległych, po przekątnej (szachownica), wyznaczonych pomiędzy krawędzią otworu, a współrzędnymi osi.

Niekiedy wykonuje się specjalny otwór technologiczny o średnicy min. 20 mm lub więcej, z tolerancją np. H6 – H7, i ten otwór stanowi punkt odniesienia. Oznacza się go identycznie jak punkt odniesienia , czyli zaczerniając dwie naprzeciwległe ćwiartki otworu. Od tego punktu odnosi się wszystkie współrzędne poszczególnych, lecz tylko dokładnych, otworów. Nie dotyczy to otworów pod śruby i kołki wsporników, które wymiaruje się już od wykonanej osi otworu np. łożyskowego w tej osi. Punktem odniesienia może być też otwór pod jeden z kołków ustalających wspornik, jeżeli jest walcowy, lub jakiś inny otwór, zwłaszcza taki, którego oś występuje w innym współpracującym korpusie. Wszystkie osie powinny być oznaczone. I tak, osie pod kołki najlepiej jest oznaczyć kolejnymi literami: A, B itd., a osie pod łożyska lub główne kołki ustalające położenie wsporników w przyrządach spawalniczych – kolejnymi cyframi: 1, 2, 3 itd. Można tu stosować różne wyróżnienia np. grupowe i niektóre grupy otworów oznaczać np. A1, A2 itd., 101, 102, 103, itd., a inne 201, 202, 203 itd. Oznaczenia te są konieczne do pisania technologii wykonania, programu CNC, czy kart pomiarowych korpusu. Na rysunku, w widoku i przekrojach rysuje się otwór i wymiaruje się go, za wyjątkiem położenia osi otworu. Osie wszystkich otworów podaje się w specjalnej tabeli zamieszczonej na rysunku u dołu, gdzie podana są współrzędne X, Y (Z), a w osobnej rubryce – wymagana tolerancja położenia osi, która dla większości przekładni zębatych wynosi +/– 0,015 mm. Dla innych otworów może to być +/– 0,1 mm. Powinno to być każdorazowo przedmiotem analizy, ponieważ każde 0,01 mm tolerancji jest kosztowne w wykonaniu.
W następnej i ostatniej części naszego opracowania opiszemy zagadnienia związane z technologicznością konstrukcji korpusów spawanych oraz kwestie pomiarów i napraw korpusów:
Aleksander Łukomski
artykuł pochodzi z wydania 9 (96) wrzesień 2015










