

Zespół inżynierów z Uniwersytetu Pekińskiego zaprezentował robota o budowie inspirowanej ośmiornicą, który może dostosowywać sztywność uchwytu do różnych zastosowań.

Instalacja pneumatyczna zapewnia jednocześnie medium robocze w postaci sprężonego powietrza, jak i sterowanie chwytakiem poprzez zmiany ciśnienia.

Chwytak robota wykazuje się niezwykle czułym dotykiem, umożliwiającym manipulowanie tak delikatnymi przedmiotami jak maliny, albo tak kruchymi jak chipsy ziemniaczane.

W budowie chwytaków zastosowano wiązki drutu ze stopu niklu i tytanu, wykazujące właściwości pamięci kształtu.

Ruch taśmy pozwala także obracać trzymanym przedmiotem i przesuwać go w obrębie chwytaka, jak w przenośniku taśmowym.

Konstrukcja chwytaków opiera się na dyskretyzacji spirali logarytmicznej na szereg połączonych segmentów o identycznej geometrii, uszeregowanych co do wielkości.

Precyzyjne chwytaki dla robotów są w stanie bez najmniejszych uszkodzeń przemieścić nawet bardzo delikatne przedmioty.

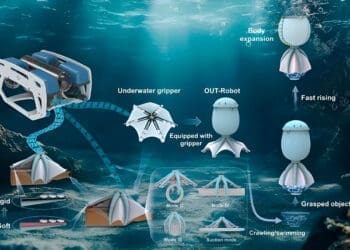
Zaproponowano trzy konfiguracje chwytaków z trzema lub czterema miękkimi palcami o napędzie pneumatycznym, z nowego typu układem blokującym, zapewniającym regulowaną sztywność.






Zapisz się, aby na bieżąco otrzymywać linki do kolejnych, darmowych wydań Projektowania i Konstrukcji Inżynierskich






























