

































Inżynierowie z Chińskiego Uniwersytetu Naukowo-Technologicznego w Hafei opracowali gamę chwytaków SpiRob do stosowania w robotyce, skonstruowanych na kształt spirali logarytmicznej, inspirowanych występującymi w przyrodzie narządami, takimi jak ogony koników morskich czy kameleonów, macki ośmiornic czy trąby słoni.
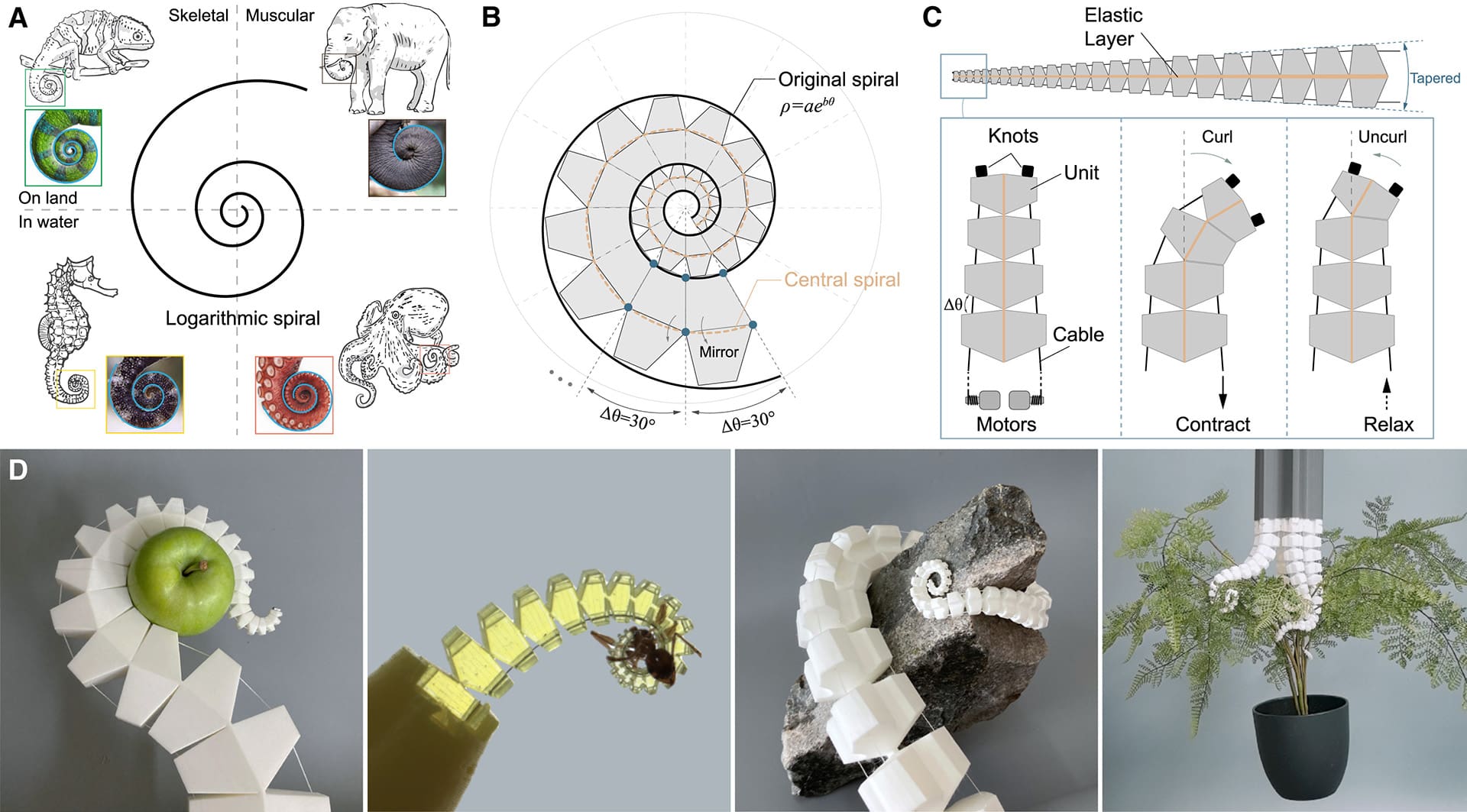
Opracowane założenia konstrukcyjne umożliwiają budowę chwytaków o różnych wymiarach, zdolnych do podnoszenia obiektów o zróżnicowanych kształtach i rozmiarach, z wykorzystaniem tej samej zasady działania i tego samego systemu sterowania. Konstrukcja chwytaków opiera się na dyskretyzacji spirali logarytmicznej na szereg połączonych segmentów o identycznej geometrii, uszeregowanych co do wielkości. Mechanizm zwijania i rozwijania spiralnego chwytaka sterowany jest zaledwie dwiema linkami.
Nawet pojedyncza spirala może być w pełni funkcjonalnym chwytakiem, możliwe jest jednak łączenie kilku spiral w zespoły. Chwytany przedmiot jest obejmowany z kilku stron, co zapewnia pewny uchwyt i umożliwia podnoszenie przedmiotów o masie 260 razy większej od masy chwytaka. Odpowiedni dobór ruchów chwytaka pozwala na wykonywanie także dodatkowych operacji, takich jak uderzenia czy rzucanie przedmiotów w konkretnym kierunku.
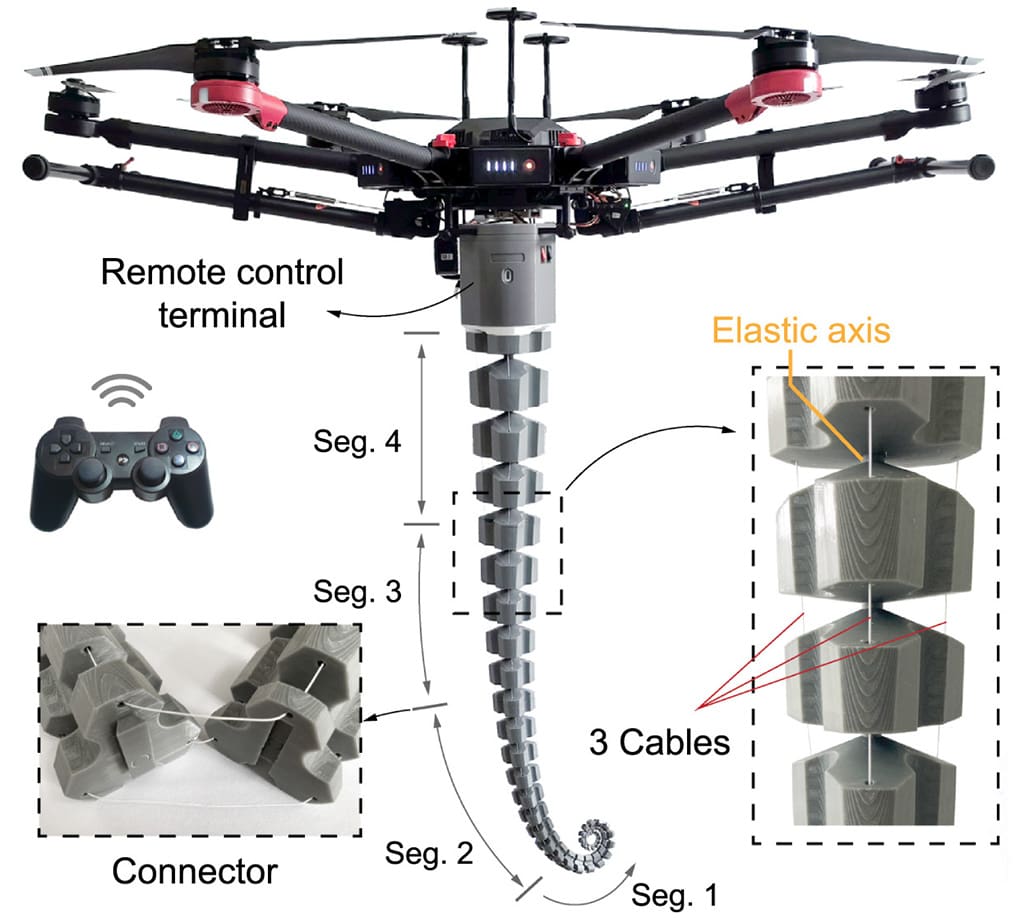
Wariant chwytaka, sterowany trzema linkami, może wykonywać bardziej złożone ruchy. Został opracowany z myślą o instalacji na dronach w celu zręcznego chwytania przedmiotów z powietrza.
Zhanchi Wang, Nikolaos M. Freris, Xi Wei, SpiRobs: Logarithmic spiral-shaped robots for versatile grasping across scales, Device, 2024, 100646










