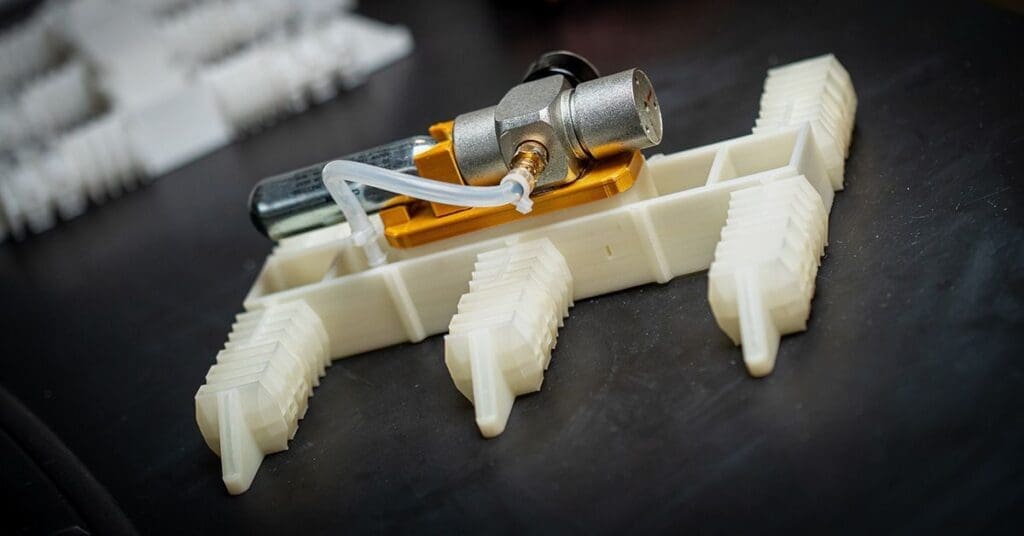
Sześcionożny robot drukowany w 3D, po podłączeniu kapsuły z gazem, może samodzielnie zejść z płaszczyzny roboczej drukarki.
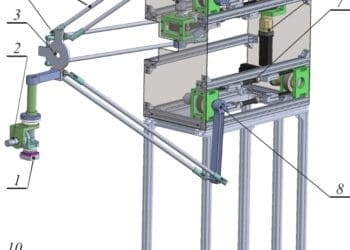
Opracowany przez inżynierów z Bioinspired Robotics Laboratory Uniwersytetu Kalifornijskiego w San Diego miękki robot został wyprodukowany w całości w pojedynczym procesie druku 3D przy użyciu ogólnodostępnego filamentu. Motoryka robota opiera się na zamkniętym łańcuchu kinematycznym, kontrolowanym przez pneumatyczny obieg oscylacyjny, odpowiadający za powtarzalne ruchy nóg robota. Każda z nich ma cztery stopnie swobody. Poruszając się naprzemiennie do przodu i do tyłu oraz do góry i do dołu w odpowiedniej sekwencji, wprawiają robota w ruch.
Do napędu robota posłużyła standardowa kapsuła ze sprężonym dwutlenkiem węgla. Moduł zasilający zawiera ponadto zawór regulujący ciśnienie gazu. Może być zainstalowany na grzbiecie robota zaraz po ukończeniu jego druku. Alternatywnie robot może być zasilany gazem dostarczanym przewodowo.
Dzięki temu, że jest zupełnie pozbawiony elektroniki, robot bez problemu może funkcjonować pod wodą. Trwają prace nad wyposażeniem go w proste manipulatory, sterowane pneumatycznie na podobnej zasadzie co nogi. Tym samym robot coraz bardziej zaczyna przypominać dużego kraba. Docelowo planowane jest także zintegrowanie instalacji gazowej w kadłubie robota.
today.ucsd.edu