


























Zaawansowana kinematyka procesu frezowania, opracowana w Instytucie Fraunhofera ds. Technologii Wytwarzania i Zaawansowanych Materiałów (IFAM), zaciera granice pomiędzy obrabiarkami a robotami przemysłowymi.
Technolodzy obróbki metali wraz z robotykami z IFAM podjęli się poprawy dynamiki i precyzji frezujących robotów przemysłowych. Zaprezentowali technologię zrobotyzowanej obróbki, łączącą w sobie komputerowe sterowanie, wykorzystujące strategie oparte na modelu, ze specjalnymi rozwiązaniami w zakresie napędu i mechaniki robotów. Współpracujące systemy zoptymalizowano pod kątem dynamicznej kompensacji błędów i redukcji wibracji. Tym samym możliwe stało się osiągnięcie zwiększonej produktywności, dzięki dużej prędkości usuwania materiału i szybkim posuwom, przy jednoczesnym zachowaniu stałej dokładności, nawet pod wpływem działania dynamicznych sił, towarzyszących skrawaniu.
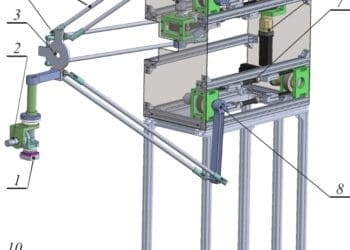
Roboty frezujące, poruszające się po torze wzdłuż obrabianego detalu, w porównaniu z frezarkami bramowymi, zajmują stosunkowo niewielką przestrzeń, a ich cena nie jest tak ściśle związana z gabarytami obrabianego detalu. Przegubowe ramię robota przemysłowego zintegrowane z łatwo konfigurowalną osią liniową tworzą elastyczną kombinację, którą można łatwo zaadoptować na potrzeby obróbki wyrobów o zróżnicowanych gabarytach. W prezentowanym rozwiązaniu dużą sztywność w ruchu liniowym i eliminację poślizgu osiągnięto poprzez zastosowanie podwójnego napędu zębatkowego ze zredukowanym luzem liniowym.
Z kolei odpowiednią precyzję sterowania przegubami robota uzyskano dzięki zastąpieniu typowych serwonapędów hybrydowymi napędami osi, łączącymi przekładnię zębatą, przenoszącą obciążenia statyczne z bezpośrednim przeniesieniem momentu obrotowego, załączanym podczas przyspieszania i hamowania napędu. Przeprowadzone według normy ISO 9283 testy pozycjonowania wykazały dokładność poniżej 0,1 mm.
Adaptacja typowego robota przemysłowego na potrzeby frezowania może skutkować błędami pozycjonowania i powtarzalności, z odchyleniami obróbki rzędu kilku milimetrów, praktycznie uniemożliwiającymi zastosowania przemysłowe. Opracowana technologia wykorzystuje system automatycznej kalibracji robota, przy użyciu modelu obliczeniowego, zawierającego ponad dwieście parametrów opisujących kinematykę robota, co ma umożliwić wydajną obróbkę wyrobów z różnych materiałów konstrukcyjnych, od kompozytów włóknistych, przez aluminium, po stal i stopy tytanu. Podczas testowej obróbki elementu konstrukcyjnego o długości siedmiu metrów osiągnięto odchylenie wynoszące zaledwie 0,15 mm, przy posuwie 10 metrów na minutę. Obecnie trwają prace nad wdrożeniem prezentowanej technologii do produkcji seryjnej.
ifam.fraunhofer.de