

































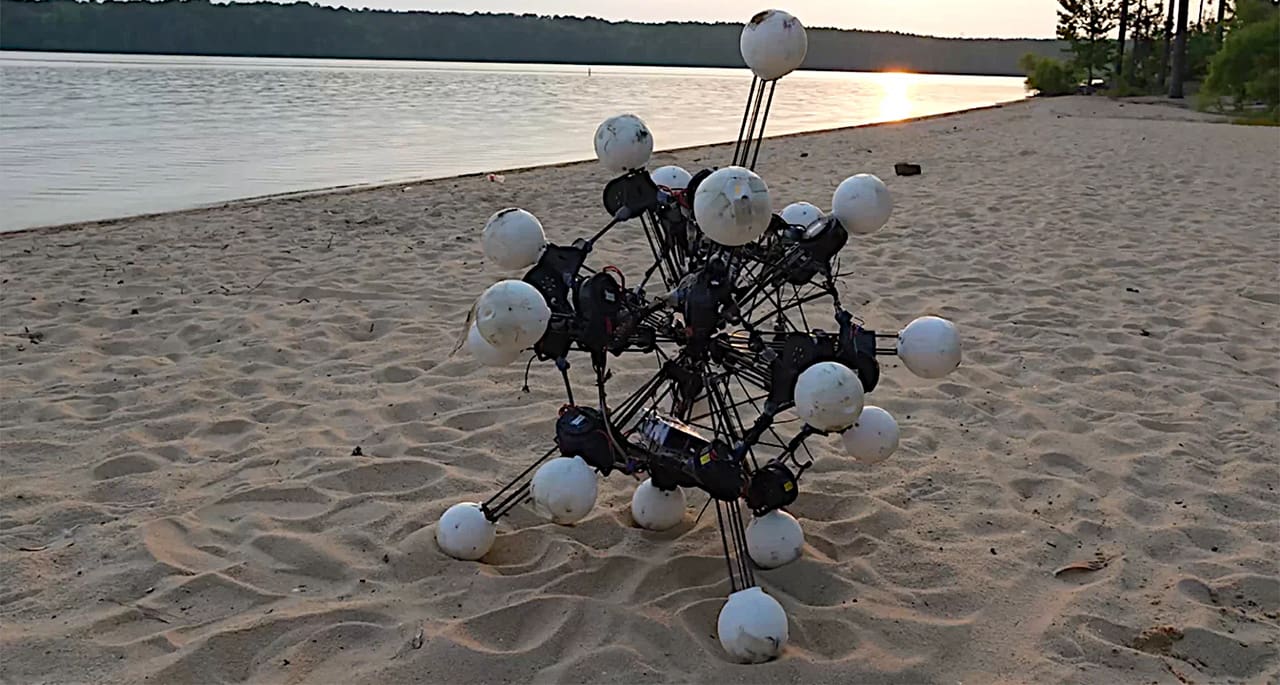
Konstrukcja robota opiera się na dwunastościanie foremnym. Z każdego z jego dwudziestu wierzchołków wyprowadzony jest teleskopowy siłownik, zakończony kulistą stopą, mieszczącą kamerę. Taki układ zapewnia prawie całkowicie jednorodny rozkład przyspieszenia we wszystkich kierunkach, a zarazem prawie całkowicie jednorodne pole widzenia na wszystkie strony. Stąd też nazwa robota, nawiązująca do Argusa (Argosa) – stuokiego olbrzyma z mitologii greckiej.
Koordynacja ruchu siłowników umożliwia kontrolowany ruch robota w wyznaczonym kierunku i stabilizację pozycji. Argus z łatwością pokonuje przeszkody terenowe, poruszając się po lasie, na terenach podmokłych i po piasku. Potrafi także wspinać się pomiędzy dwiema pionowymi ścianami, przenosić niewielkie ładunki i popychać przedmioty w wyznaczonym kierunku. Koordynacja ruchu zapewnia zachowanie pełnej funkcjonalności robota nawet po utracie do trzech siłowników.



Konfiguracja Argusa, wybrana spośród półtora tysiąca opcji, pozwala robotykom na rozwinięcie koncepcji dynamicznej symetrii i dynamicznej izotropii, opisujących równomierny zakres przyspieszenia środka ciężkości we wszystkich kierunkach. Dotychczasowe drony i roboty, również humanoidalne, wykazywały dynamiczną izotropię na poziomie 0,6. Argus osiąga wartość 0,9 – zbliżoną do teoretycznego maksimum.
pratt.duke.edu










