

































Zespół badawczy z KAIST (Korea Advanced Institute of Science and Technology) pod kierownictwem prof. Hae-Won Park’a z wydziału mechanicznego zbudował czworonożnego robota, który może poruszać się ze stosunkowo dużą prędkością po metalowych ścianach i sufitach. Robot nazwano M.A.R.V.E.L. – od angielskiego Magnetically Adhesive Robot for Versatile and Expeditious Locomotion.
Podczas prac nad konstrukcją okazało się, że zapewnienie robotowi przyczepności w warunkach statycznych przy pomocy elektromagnesów nie jest specjalnie trudne, jednak w warunkach dynamicznych, podczas ruchu robota, stanowi skomplikowany problem, wymagający koordynacji systemów elektrycznych i mechanicznych robota, jak też specjalnych rozwiązań konstrukcyjnych.
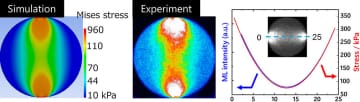
Koreańscy inżynierowie opracowali podkładki pod stopy robota, zapewniające przyczepność w krótkich cyklach pracy, dzięki zastosowaniu magnesów EPM (Electro-Permanent Magnet) i elastycznego materiału MRE (Magneto-Rheological Elastomer). Kombinacja EPM i MRE pozwoliła osiągnąć przyczepność wertykalną o sile 535 N i poprzeczną o sile 445 N, przy niewielkim zużyciu energii elektrycznej i masie podkładki 169 g w porównaniu do masy własnej robota wynoszącej ok. 8 kg.

Tak wyposażony robot jest zdolny poruszać się z prędkością 70 cm/s po pionowej ścianie i do 50 cm/s po suficie. Dwukrotnie wolniej przemieszcza się po powierzchniach pomalowanych bądź zardzewiałych i brudnych. Po drodze jest w stanie pokonywać przeszkody wystające ze ścian i sufitów na wys. do 5 cm.
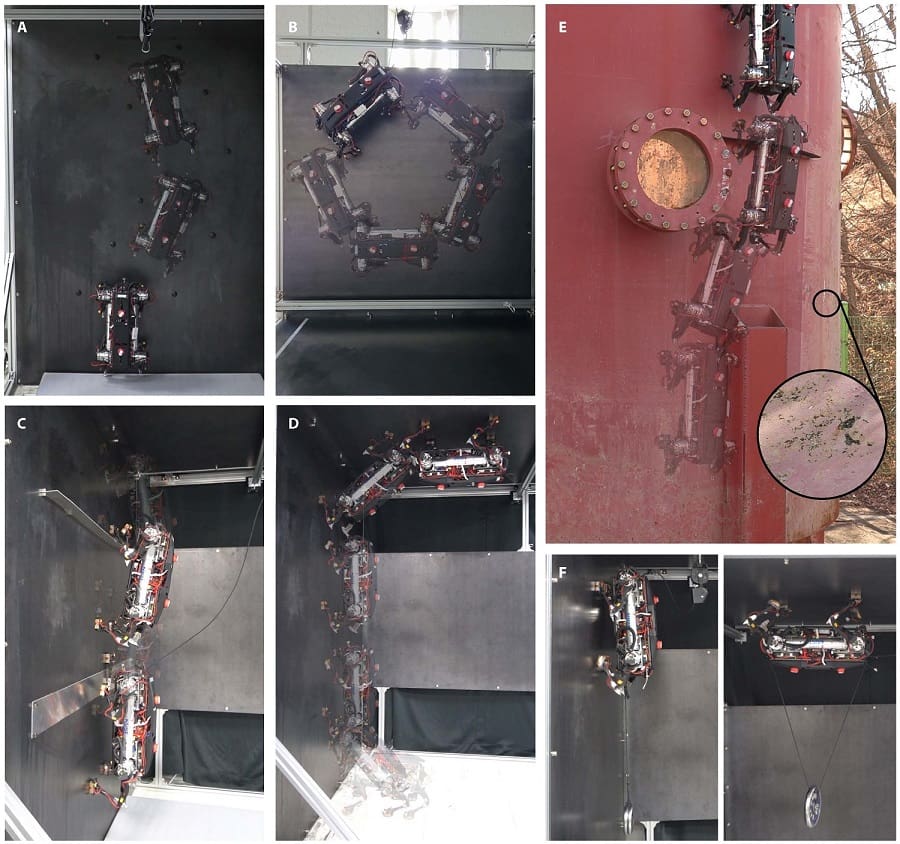
Jak przekonuje mgr inż. Yong Um z wydziału mechanicznego KAIST, MARVEL otwiera nowe perspektywy zastosowania czworonożnych robotów kroczących. Sprawdzi się przede wszystkim podczas prac inspekcyjnych dużych obiektów i konstrukcji przemysłowych, wykonanych z materiałów ferromagnetycznych.
news.kaist.ac.kr










