W mojej ponad 30 letniej praktyce badań dokładności i problemów z dokładnością obróbki na obrabiarkach często spotykałem się z pytaniami typu:
- Dlaczego wychodzi mi dużo braków przy obróbce w ruchu interpolowanym, mimo sprawdzenia obrabiarki „laserem” i wprowadzeniu poprawek korekcyjnych?
- Dlaczego jeden rodzaj obróbki wychodzi bardzo dobrze, a drugi źle na tej samej obrabiarce?
Skłoniło to mnie to już dość dawno do zastanowienia się nad problemem, jak przełożyć diagnozowaną dokładność geometryczną, pozycjonowania, kinematyczną itd. obrabiarki na dokładność obróbki, szczególnie dla obróbek specjalnych wymagających ruchów złożonych. Postanowiłem zacząć od tokarek, jako że przebadałem różnymi metodami co najmniej 200 tych maszyn, w tym wiele prototypowych przeznaczonych właśnie do obróbek specjalnych. Na wstępie postawiłem sobie także pytania:
- czy wskaźniki dokładności wyznaczane na podstawie typowych testów badań odbiorczych mogą być miarą zdolności do dokładnej obróbki każdego rodzaju?
- jakiej dokładności wynikającej z własności tokarki należy się spodziewać dla danego rodzaju obróbki i jak ją ocenić bez konieczności wykonywania detali próbnych, szczególnie przy obróbkach złożonych?
W artykule zamieściłem wstępne przemyślenia z moich doświadczeń i wykonanych prac dotyczących dokładności obrabiarek, jak należy podejść do postawionego w pytaniach problemu.
Wstęp
Rozwój układów sterowania powoduje, że uniwersalne tokarki CNC posiadają coraz więcej możliwości i pozwalają na wykonywanie wielu operacji obróbkowych wynikających ze złożenia różnych rodzajów zadanych ruchów technologicznych. Przykładowo są to:
- toczenie powierzchni krzywoliniowych (ruchy interpolowane osi posuwowych),
- frezowanie i wiercenie po obwodzie narzędziami obrotowymi (ruch złożony osi posuwowych i obrotowych),
- obróbka z przechwytem przez wrzeciono przechwytujące (synchronizacja obrotów wrzecion),
- wysokowydajne „toczenie” wielokątów (synchronizacja stałego przełożenia obrotu wrzeciona i narzędzia obrotowego z jednoczesnym ruchem posuwowym narzędzia) [1],
- obróbka gwintów falistych (synchronizacja obrotów wrzeciona z cyklicznym ruchem nawrotnym osi X i posuwem osi Z)[4].
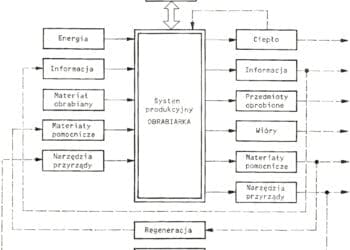
Operacje te wykorzystują złożenie różnych ruchów technologicznych posuwowych i obrotowych dla uzyskania żądanej trajektorii skrawania (styku narzędzia z przedmiotem obrabianym). Wszelkie odchyłki od oczekiwanej/zadanej pozycji lub trajektorii ruchu powodują błędy obróbki. Odchyłki te względem przyjętych punktów charakterystycznych mocowania narzędzia i przedmiotu (punkty A,B,C na schemacie Rys. 1), ustalających oczekiwane/nominalne położenie przedmiotu zamocowanego w uchwycie wrzeciona i narzędzia w przestrzeni roboczej tokarki, są przyczyną błędów obróbki wynikających z właściwości obrabiarki. W diagnostyce tej nie rozpatrujemy błędów obróbki wynikających z przyjętych parametrów skrawania, zużycia narzędzia, wibrostabilności, zakładając poprawne parametry skrawania obróbki wykańczającej.
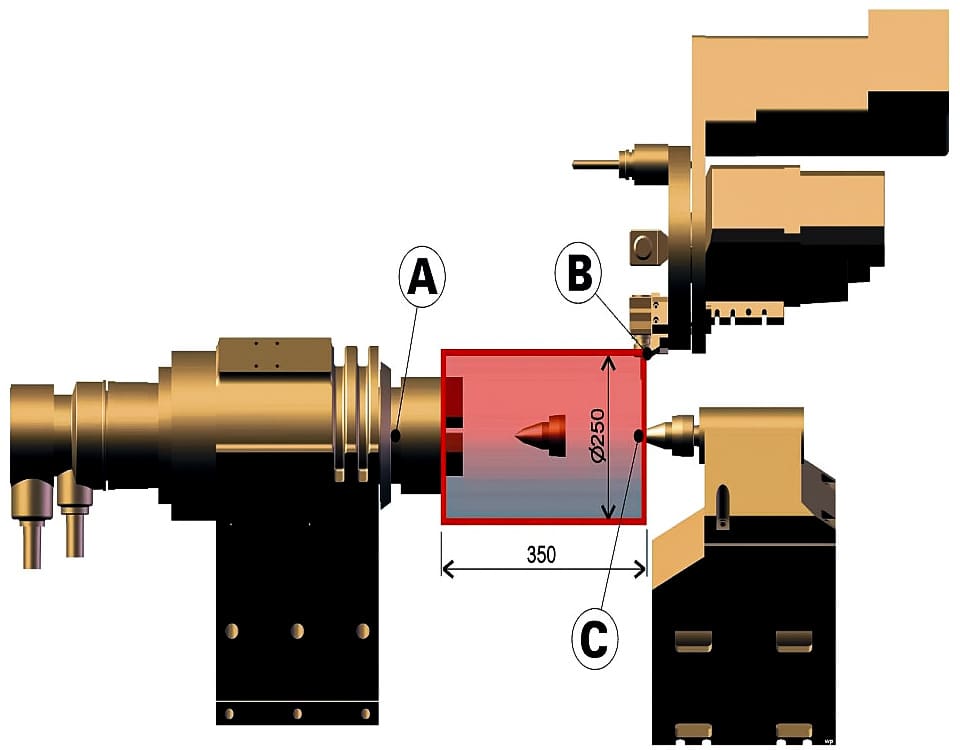
A – punkt przecięcia osi wrzeciona głównego z płaszczyzną prostopadłą do niej określoną przez płaszczyznę czoła wrzeciona,
B – punkt określony przez końcówkę ostrza narzędzia skrawającego poruszający się wraz z suportem w płaszczyźnie obróbki (XZ),
C – punkt określony przez końcówkę kła konika, leżący w osi wrzeciona i poruszający się wzdłuż tej osi (rozpatrywany wspólnie z punktami A i B, dla wersji tokarki z konikiem).
Założenia te są punktem wyjścia do diagnostyki błędów obróbki, wynikających z właściwości tokarki. Przy rozpatrywaniu ruchów technologicznych, możemy inaczej spojrzeć na podział błędów obrabiarki, dzieląc je na błędy powodujące stałe lub chwilowe zmiany oczekiwanych położeń narzędzia i przedmiotu obrabianego, co powinno ułatwić diagnostykę przyczyn błędów rozpatrywanej obróbki. Ze względu na charakter wpływu na trajektorię zadanych ruchów można je podzielić na:
- Błędy odwzorowania statycznego realizowanego zarysu (konturu) odzwierciedlają błędy geometryczne, pozycjonowania lub zastosowanego modelu obliczeniowego, określającego pozycję zadaną, wpływające na wzajemne usytuowanie narzędzia i przedmiotu na danej pozycji w stanie ustalonym (po zatrzymaniu ruchu dojścia do tej pozycji).
- Błędy wartości średnich zadanych prędkości (liniowych i obrotowych) odzwierciedlają najczęściej błędy kinematyczne przełożeń zastosowanych w konstrukcji napędów. Dla niektórych rodzajów obróbki (np. gwintowania) powodują narastający błąd oczekiwanej pozycji kątowej przedmiotu obracanego lub liniowej narzędzia. Są szczególnym rodzajem błędów nadążania.
- Błędy nadążania odzwierciedlają zbyt wolną (szybką) realizację zadanej wartości ruchu, rozpatruje się je w funkcji czasu, wynikają najczęściej z własności, możliwości i nastaw układów serwonapędowych w stosunku do zadanych wartości, powodując zmiany chwilowych położeń narzędzia i przedmiotu względem wartości oczekiwanych.
- Błędy przemieszczeń dynamicznych są wynikiem oddziałujących sił, zadawanych ruchów i własności tokarki (sztywności, wibrostabilności, dokładności kinematycznych). Typowe diagnozowane błędy zadanych pozycji chwilowych wynikają z drgań, luzów zwrotnych, tarcia, dokładności łożysk, itp.
- Błędy temperaturowe wynikają ze zmian warunków otoczenia i nagrzewania się elementów tokarki na skutek wydzielanego ciepła podczas realizacji jej ruchów. Powodują dryfty temperaturowe punktów bazowych powodując zmiany oczekiwanej wzajemnej pozycji narzędzia i przedmiotu. Zmiany te w odróżnieniu do błędów dynamicznych i nadążania są zmianami stosunkowo wolnozmiennymi w czasie. Wielkość tych zmian zależy w dużym stopniu od własności konstrukcyjnych maszyny i wielkości zadawanych ruchów.
Ponieważ decydującym o dokładności obróbki czynnikiem jest utrzymanie zadanych trajektorii ruchów technologicznych, dlatego też, aby zdiagnozować przyczyny błędów obróbki należy zastosować metody, którymi można zweryfikować dokładność realizacji tych ruchów tak w przestrzeni jak i w czasie. Poniżej przedstawiam wg mnie najbardziej przydatne metod badań, aby móc ocenić błędy ruchów technologicznych i zdiagnozować przyczyny błędów wykonania detali w obróbkach specjalnych, oraz mieć narzędzia do oceny przeprowadzanych regulacji i/lub napraw obrabiarki.
Wybór metod badań
Do diagnostyki błędów ruchów technologicznych w obróbkach specjalnych, najbardziej przydatne wydają mi się następujące metody badań:
- test interpolacji kołowej osi posuwowych tokarki (wg ISO 230-4:1999),
- pomiar błędnych ruchów wirujących osi (wg ISO 230-7:2006),
- pomiar dokładności i równomierności zadanych prędkości osi obrotowych.
Pomiary w/w metodami należy wykonać przy znanych, lub zakładanych parametrach danej obróbki, w spodziewanym położeniu jej wykonywania. Przy niektórych rodzajach obróbki, lub obróbki wielkoseryjnej, może być także potrzeba wykonania dodatkowych pomiarów (np. dokładności pozycjonowania wg ISO-230-2, odkształceń cieplnych wg ISO-230-3). Wybór, dokładność i parametry metod badań należy dostosować do wymagań dokładności wykonywanego zadania obróbkowego i/lub przewidywanych wielkości serii.
Tokarki wyróżniają się tym od innych obrabiarek, że z wrzecionem wiruje przedmiot obrabiany, a nie narzędzie, a ruchy posuwowe narzędzi/głowicy realizowane są na płaszczyźnie (XZ), a nie w przestrzeni. Powoduje to różnice w podejściu do analizy błędów, w porównaniu z innymi obrabiarkami, a wyznaczane w metodach badań wskaźniki dokładności nie przekładają się w ten sam sposób na błędy obróbki, jak np. w obrabiarkach typu frezarka.
Jakie błędy trajektorii ruchów możemy diagnozować stosując proponowane metody badań:
Test interpolacji kołowej osi posuwowych tokarki (wg ISO 230-4)
Metoda przydatna do oceny błędów trajektorii ruchu interpolowanego osi posuwowych w zakresie błędów dynamiki ruchu osi (nadążania, nawrotu), błędów odwzorowania konturu (wynikających z nieprostoliniowości, nieprostopadłości, pozycjonowania, błędów cyklicznych, kinematycznych), oraz analiz wpływu stosowanych regulatorów i ich nastaw na błędy zadanej trajektorii ruchu interpolowanego. Należy jednak pamiętać, że wskaźnik kołowości teście interpolacji kołowej osi posuwowych, w tokarkach dotyczy płaszczyzny XZ, a okrągłość toczonego np. wałka uzyskujemy w płaszczyźnie XY (Rys. 2). Wskaźnik ten nie przekłada się bezpośrednio na błędy obróbki toczonych przedmiotów. Dodatkowo w tokarkach ten sam błąd nastawionej pozycji na kierunku X (prostopadłym do osi wirowania przedmiotu), powoduje podwojony błąd dokładności wykonania (średnica).
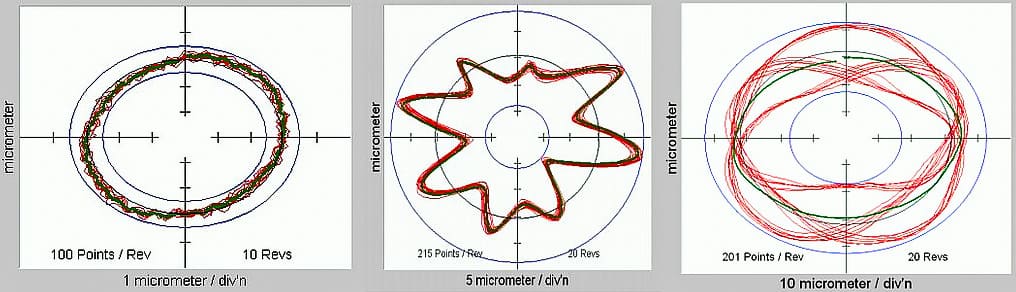
Niezależnie jednak od tego, z punktu widzenia diagnostyki i regulacji, test interpolacji kołowej jest tak samo przydatny dla tokarek, jak dla innych obrabiarek, diagnozując błędy geometryczne, kinematyczne, dynamiczne i częściowo pozycjonowania osi posuwowych, a z analizy diagnozowanych błędów można wybrać te, które mają wpływ na dany rodzaj obróbki. Rys. 3 i Rys. 4 przedstawiają przykładowe błędy zadanej trajektorii ruchu interpolowanego po okręgu diagnozowane testem interpolacji kołowej na tokarce.
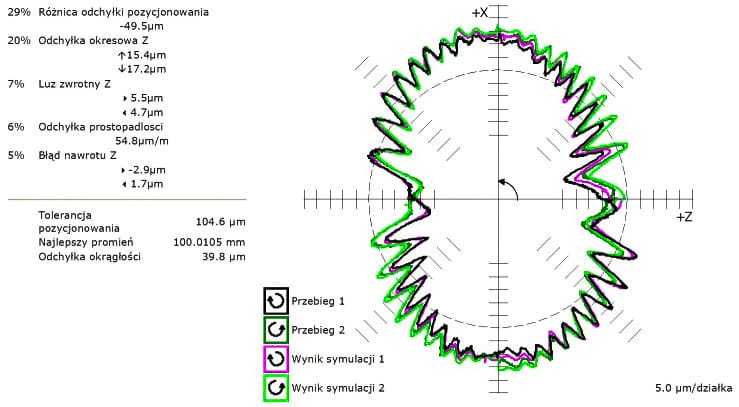
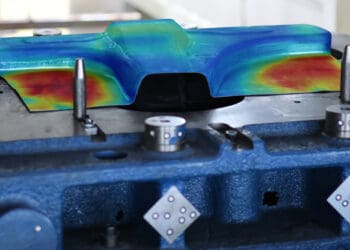
Błędy te powodują i odchyłki wymiarowe i kształtowe toczonych powierzchni (np. w przekroju XY powstanie owal przy toczeniu kuli wynikający z różnicy odchyłki pozycjonowania, oraz falistość powierzchni z błędu cyklicznego).
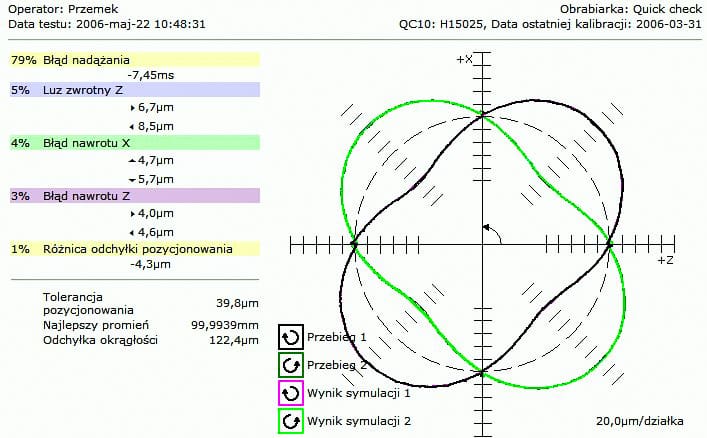
Błędy te powodują odchyłki wymiarowe i znaczne odchyłki kształtu przy toczeniu kształtowym (np. przy toczeniu kuli w przekroju XZ powstanie coś w rodzaju gruszki, a nie kuli). Ponieważ metoda testu interpolacji kołowej osi posuwowych jest stosunkowo dobrze znana, poza zamieszczonymi uwagami dotyczącymi specyfiki zastosowania na tokarkach, nie będzie dalej omawiana, natomiast szerzej omówione zostaną przykłady zastosowania pozostałych dwóch wymienionych metod.
Pomiar błędnych ruchów wirującego przedmiotu (wg ISO 230-7:2006 i ISO 230-3)
Metoda stosowana do pomiaru ruchów promieniowych, kątowych i wzdłużnych zamocowanego w uchwycie tokarki przedmiotu i oceny błędów mimośrodowości mocowania przedmiotu względem osi obrotu wrzeciona, chwilowych zmian położenia osi obrotu wrzeciona względem narzędzia w funkcji kąta obrotu, dryftów temperaturowych wrzeciona (przydatna do oceny np. błędów frezowania po obwodzie narzędziami obrotowymi, oceny błędów owalności przy toczeniu w płaszczyźnie toczenia, błędów mimośrodowości mocowania względem osi obrotu, wpływających na dokładność odwzorowanego kształtu w kierunku promieniowym, możliwej do uzyskania chropowatości dla danej prędkości obrotów, błędów odkształceń cieplnych, itd.).
Jednocześnie metoda jest bardzo przydatna do oceny jakości montażu wrzecion, stanu i dokładności łożysk po zmontowaniu, stanu ich zużycia, wykrywania luzów.
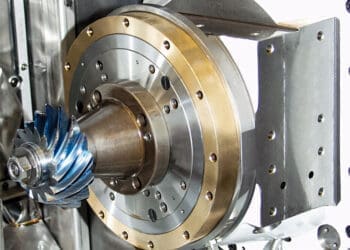
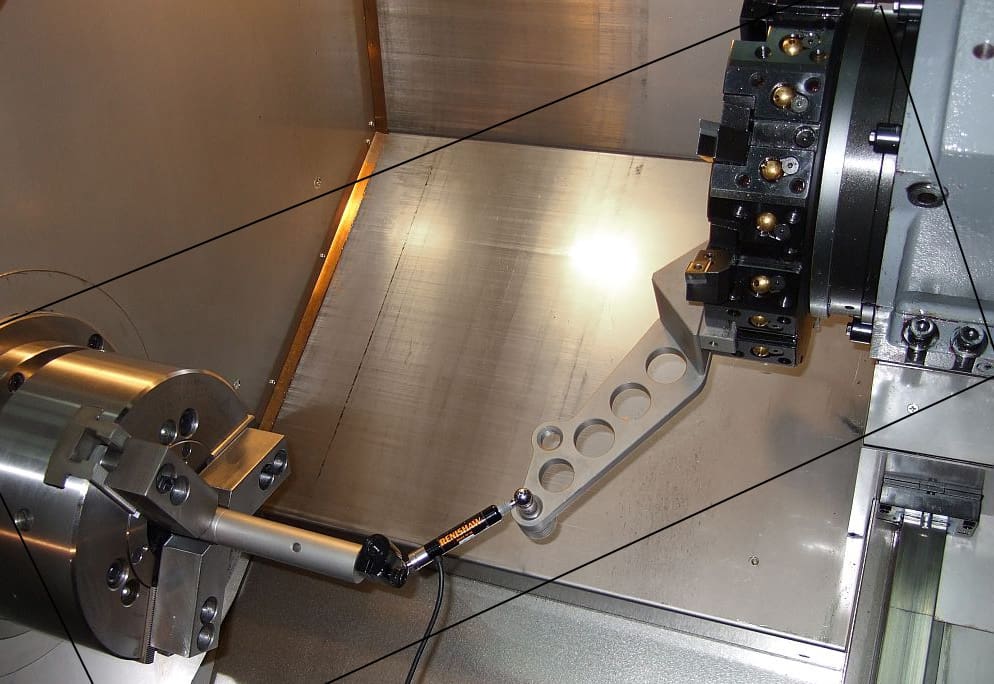
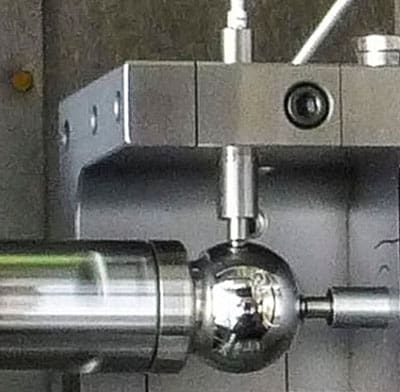
Wirująca oś jest pojęciem teoretycznym, w rzeczywistości możemy mówić o chwilowych położeniach kątowych osi, wyznaczanych przez powierzchnie walcowe elementów obrotowych(łożysk), ustalających te położenia z dokładnością wynikającą z ich błędów geometrycznych. Dodatkowo, przy większych prędkościach obrotowych znaczący udział w chwilowych położeniach osi mają siły pochodzące od dynamiki ruchu. Oś teoretyczną, idealną, można określić, jako uśrednione położenie ze wszystkich położeń chwilowych. Opisywana metodyka polega na takim sposobie pomiaru całkowitych ruchów promieniowych i osiowych wirującej osi, który eliminuje błędy geometryczne kształtu powierzchni pomiarowej przez stosowane bardzo dokładnych trzpieni wzorcowych oraz obliczeniowo mimośród powierzchni pomiarowej względem osi idealnej [2]. Mierzone są całkowite przemieszczenia promieniowe i osiowe w wybranym punkcie wzdłuż osi obrotowej w trzech prostopadłych kierunkach. Pomiaru dokonuje się bezstykowymi czujnikami przemieszczeń o dużej szybkości działania, względem wirującego trzpienia wzorcowego reprezentującego zamocowany w uchwycie przedmiot (Rys. 5).
Przy pomiarach błędów ruchu osi bezpośrednio mierzony jest parametr nazywany TIR (Total Indicator Reading), na podstawie którego wyznaczamy błędy ruchu. Pomocny jest on także do sumarycznej analizy dokładności i diagnostyki wrzecion. Reprezentuje maksymalne zarejestrowane przemieszczenia na kierunkach ustawienia czujników przemieszczeń. Wyznaczony parametr TIR zawiera w sobie:
- mimośród powierzchni pomiarowej względem teoretycznej osi obrotu;
- błędy geometryczne powierzchni pomiarowej;
- statyczne błędy ruchów osi, na kierunku pomiaru od zmian położeń kątowych;
- przemieszczenia dynamiczne osi wynikające z niewyważenia, sztywności, właściwości dynamicznych (np. częstotliwość drgań własnych); sumujące się ze statycznymi błędami przemieszczeń osi dla chwilowych położeń kątowych.
Aby wyznaczyć błędy ruchu samej osi należy wyeliminować inne błędy. Szumy pomiarowe i błędy geometryczne powierzchni pomiarowej minimalizujemy poprzez dobór wyposażenia, odpowiednich zakresów pomiarowych i dokładność trzpieni wzorcowych. Dla wyznaczenia ruchów samej osi eliminujemy obliczeniowo mimośrodowość mocowania trzpienia wzorcowego względem uśrednionej osi obrotu, wynikający z błędów oprawek, uchwytów, błędów geometrycznych powierzchni mocujących.
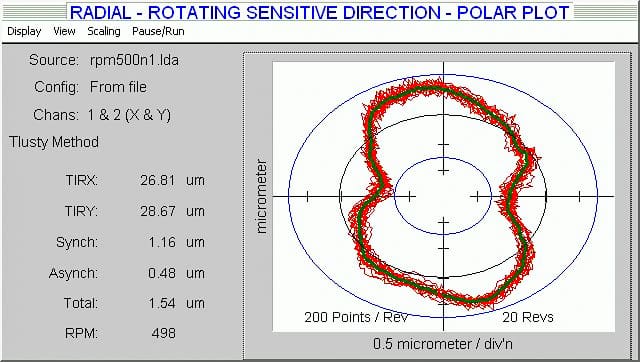
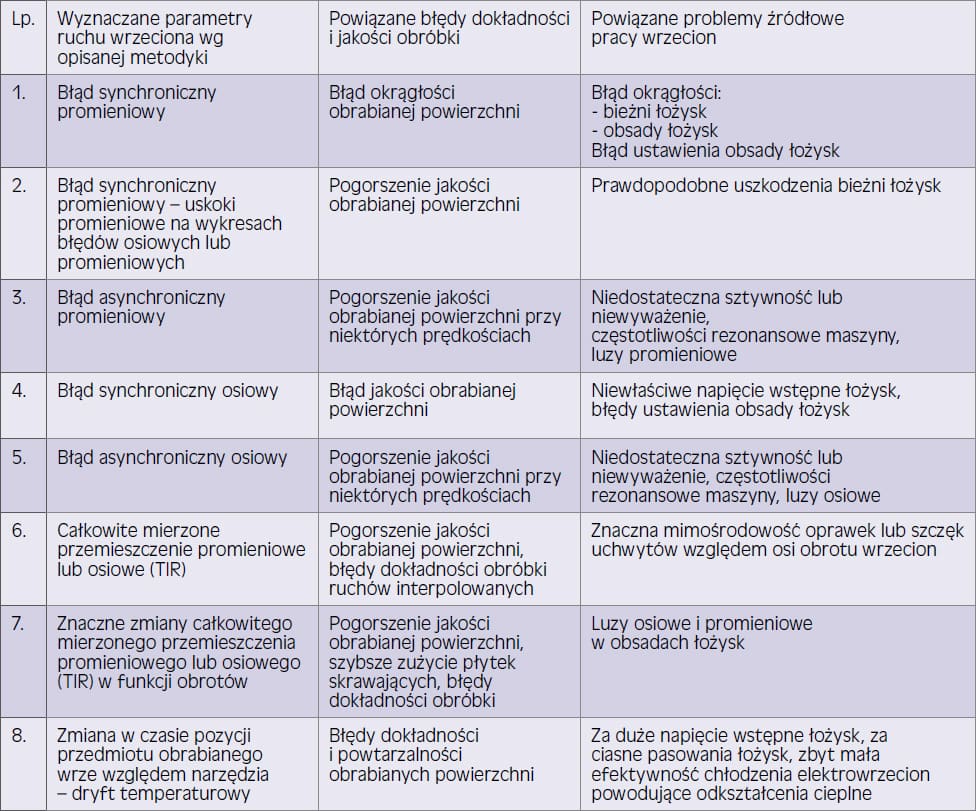
Błędy te spowodowane są zmianami położenia chwilowego osi przy ruchu obrotowym. Błędy ruchu osi określane są poprzez błąd synchroniczny, asynchroniczny, całkowity, odchyłki kątowe i dryfty temperaturowe, w kierunkach promieniowym i osiowym. Metoda pozwala analizować wiele błędów obróbki wynikających z niechcianych, poza realizowanym ruchem obrotowym, przemieszczeń zamocowanego we wrzecionie tokarki przedmiotu. Wytyczne do diagnostyki przedstawia tabela poniżej.
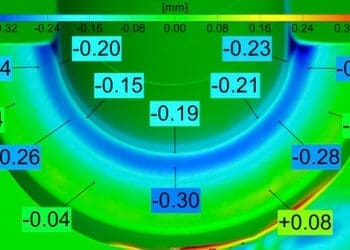
Należy zwrócić uwagę, że błędy ruchu osi to nie to samo co tzw. „bicie” promieniowe lub osiowe, gdyż nie występują tu błędy kształtu, mimośrodu powierzchni względem osi obrotu, natomiast dochodzą błędy wynikające z dynamiki ruchu. Bicie jako błąd geometryczny można porównać z parametrem TIR przy wolnych obrotach. Na rysunkach 7 przedstawiono błędy promieniowe ruchu tej samej osi dla zadanych różnych obrotów źle zmontowanego wrzeciona – widać kolosalne różnice w zależności od prędkości obrotowych. Dla wolnych obrotów błędy typu: luz w oprawie łożysk wrzeciona, słabe napięcie wstępne łożysk, może się nie ujawnić, natomiast ujawni się bardzo niekorzystnie w postaci drgań przy obróbce, słabej chropowatości i/lub owalu toczonej powierzchni.
Robert Jastrzębski
SciLab Measurements
Literatura:
[1] Jastrzębski R., Madej L., Wpływ cyklicznej niestabilności prędkościobrotowej narzędzia na płaskość powierzchni obrobionej przy toczeniu wielokątów, 7 Międzynarodowa Konferencja „Inżynieria produkcji” 30.05-01.06.2011, Wrocław. Materiały konferencyjne
[2] Jemielniak K., Analiza błędnych ruchów wrzecion szybkoobrotowych, Archiwum Technologii
[3] Jastrzębski R., Obróbka gwintów falistych i trapezowych na uniwersalnej tokarce CNC, Projektowanie i Konstrukcje Inżynierskie, nr 9 (60) wrzesień 2012, s. 52-57
[4] Majda P., Jastrzębski R., Wyniki porównawczych badań międzylaboratoryjnych,na przykładzie pomiarów dokładności i powtarzalnościpozycjonowania liniowych osi frezarki sterowanej numerycznie, Przegląd Mechaniczny, zeszyt 11/2011, s. 17-24
artykuł pochodzi z wydania 7/8 (82/83) lipiec/sierpień 2014