Coraz częściej w medycynie stosowane są roboty w celu wspomagania chirurgów podczas operacji. Podobnie wykorzystuje się roboty w zastosowaniach rehabilitacyjnych, szczególnie w celu rehabilitacji osób z dysfunkcją kończyn. W tym też celu zaprojektowano robota typu Delta, który w swoim łańcuchu kinematycznym ma sztuczne muskuły pneumatyczne. Urządzenie ma wspomagać ruch i wzmacniać siłę mięśni pacjentów podczas ćwiczeń rehabilitacyjnych. Ma pomóc również usprawnić ruchowo pacjentów z neurogenną dysfunkcją narządu ruchu kończyn górnych. Dysfunkcja może dotyczyć pacjentów z porażeniem układu nerwowego oraz pacjentów po urazach neurologicznych i ortopedycznych. Zastosowanie sztucznych muskułów pneumatycznych, które naśladują pracę ludzkich mięśni, ma umożliwić uzyskanie płynnych ruchów i zabezpieczyć przed zbyt dużym obciążaniem.
Wzorce ruchowe
W celu wyznaczenie kształtu przestrzeni roboczej oraz zakresu ruchów efektora zarejestrowano typowe wzorce ruchowe. Badania przeprowadzano w ośrodku zajmującym się rehabilitacją. Wyznaczenie wzorców ruchowych odbywało się podczas wykonywania ćwiczeń przez zawodowego rehabilitanta. Odpowiednio przygotowano scenę ze skalą noniuszową w postaci czarnobiałej szachownicy o znanych wymiarach. Pozwoliła ona na wyznaczenie trajektorii ruchu rejestrowanych sekwencji. W trakcie realizacji zadania przeprowadzono szereg analiz dotyczących głównie badań statycznych i dynamicznych głównych napędów urządzenia, w tym sztucznych muskułów pneumatycznych. Wyznaczone trajektorie pozwoliły na przeprowadzenie badań symulacyjnych zakresów pracy przegubów wchodzących w skład mechanizmów ramion czynnych i biernych urządzenia. Wyznaczono długości elementów konstrukcji, w tym kształtu ramion czy wielkości platformy roboczej.
Konstrukcja urządzenia przygotowywana była do sprawdzenia na osobach zdrowych, poprzez wspomaganie ruchu oraz wzmacnianie siły mięśni, a także na pacjentach, podczas ćwiczeń rehabilitacyjnych do usprawniania ruchowego pacjentów z dysfunkcją narządów ruchu kończyn. Na podstawie przeprowadzonych badań wykonano modelowanie ruchów dla pacjentów z dysfunkcjami i urazami ortopedycznymi.
Model robota
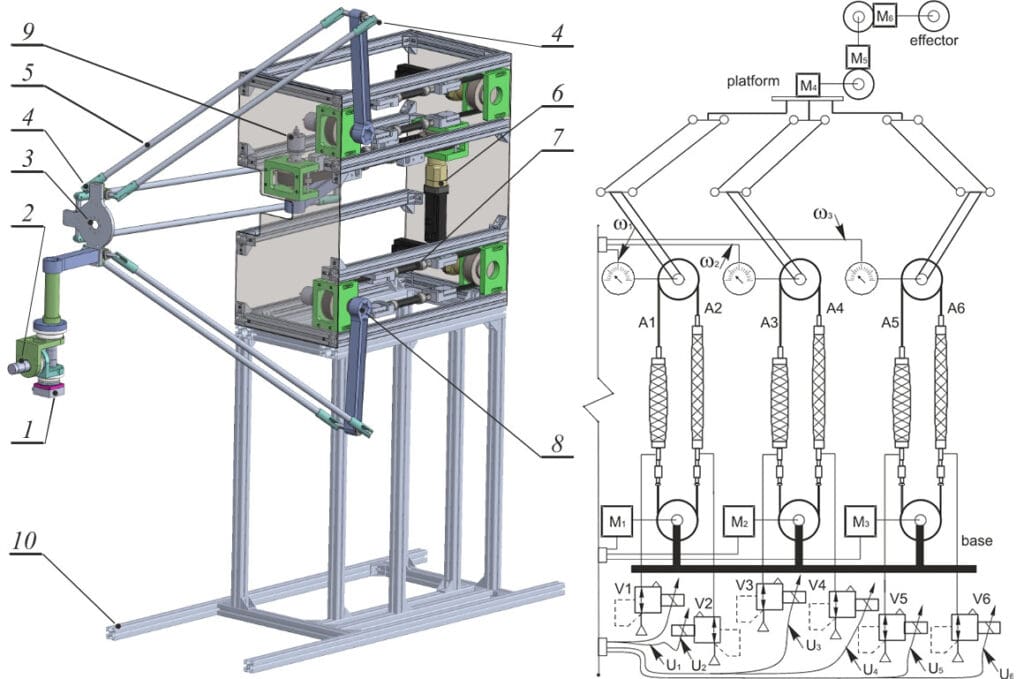
Manipulator został zaprojektowany na podstawie konstrukcji robotów równoległych o trzech stopniach swobody. Na rysunku 1 przedstawiono podstawowe elementy składowe robota.Na podstawie przeprowadzonych badań eksperymentalnych wyznaczenia wzorców ruchowych PNF (Proprioceptive Neuromuscular Facilitation) dobrano długości ramion czynnych oraz biernych manipulatora. Metody ćwiczeń oparte na PNF to uznane na całym świecie podejście do procedur terapeutycznych w rehabilitacji i uznane za skuteczne leczenie pacjentów z szeroką gamą dysfunkcji ruchowych. Zaprojektowano modele bryłowe urządzenia w oprogramowaniu CAD. W celu odtwarzania wzorców ruchowych zaprojektowano układ sterowania przedstawiony na rysunku 2.
Konstrukcja urządzenia jest symetryczna w płaszczyźnie poziomej do podstawy. Mechanizmy manipulatora rozmieszczone na podstawie planu trójkąta, a każdy łańcuch kinematyczny składa się z aktywnych i pasywnych ramion. Ramię napędowe (aktywne) wykonane jest z profilu aluminiowego, którego jeden koniec zamontowany jest do przegubu obrotowego, natomiast drugi połączony jest do pasywnych ramion. Oś obrotu wału ramienia napędowego (czynnego) połączona jest z czujnikiem położenia kątowego. Ramię bierne składa się z dwóch rur aluminiowych tworzących równoległobok.
W wyniku prowadzonych prac nad prototypem urządzenia wykonano modele platformy roboczej i przegubów w technologii przyrostowej. Wykonano serię prototypów muskułów pneumatycznych, do wytworzenia których przygotowano matryce do zakuwania przyłączy zasilająco-napędowych. Prototypy matryc wykonane zostały z użyciem obróbki CNC i technologii elektrodrążenia. Wraz z partnerem przemysłowym, firmą Utech Technics, przeprowadzono prace mające na celu opracowanie konstrukcji oraz technologii wytwarzania sztucznych pneumatycznych napędów mięśniowych. Opracowano autorskie przyłącza zasilające, będące jednocześnie zakończeniami napędów mięśniowych. Pełnią one podobną funkcję do ścięgien naturalnych mięśni. Następnie przeprowadzono badania i próby wytrzymałościowe dla opracowanych przyłączy, dokonując niezbędnych korekt technologicznych. W opracowanym pojedynczym napędzie elastycznym w sposób trwały łączone są elementy oplotu, wewnętrznego pęcherza i przyłączy zasilających. W wyniku tych prac uzyskano konstrukcję elastycznych muskułów pneumatycznych mogących przenosić obciążanie statyczne wynoszące do 800 N. Nominalne średnice muskułów wynoszą 18 mm, natomiast długości dobierane są zależnie od zapotrzebowania. Skurcz muskułu wynosi do 35% długości początkowej.
Przestrzeń robocza manipulatora typu delta 6-DoF
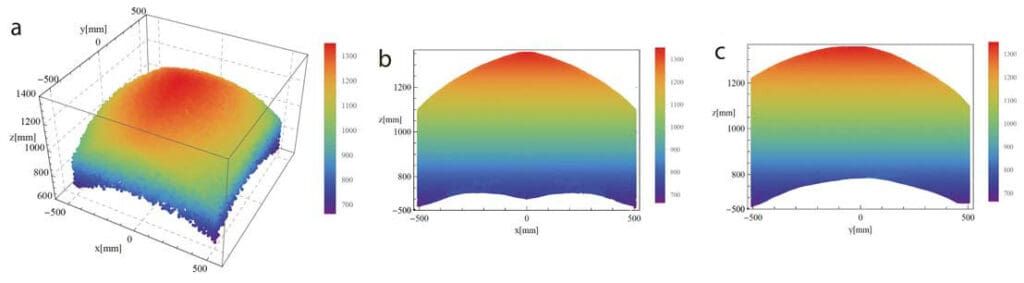
Przestrzeń robocza manipulatora to zbiór punktów w przestrzeni, do których może być doprowadzony jego efektor. Zarówno rozmiar, jak i kształt przestrzeni roboczej zależą od struktury kinematycznej, wymiarów geometrycznych i zakresu ruchu poszczególnych elementów manipulatora. Dla zaprojektowanego manipulatora Delta 6-DoF przestrzeń roboczą wyznaczono za pomocą metody dyskretyzacji objętości. W tym celu w prostopadłościanie o wymiarach, x∊‹-600,600›mm, y∊‹-600,600›mm, z∊‹-500,1400›mm, wygenerowano w sposób losowy kilka tysięcy punktów. Następnie wybrano zestawy punktów, dla których możliwe było rozwiązanie problemu kinematyki odwrotnej (pod warunkiem, że zmienne przegubowe wszystkich aktywnych ramion manipulatora spełniają następujący warunek q∊‹-45°,45°›). Przestrzeń roboczą wyznaczono dla kąta obrotu przegubowej platformy ruchomej θ = 0°. Przestrzeń robocza została zoptymalizowana pod kątem zakresów zgodnych z procedurami PNF, a jej kształt przedstawiono na rysunku 3.
Badania eksperymentalne
Wraz z partnerem przemysłowym opracowano technologię wytworzenia elementów składowych manipulatora równoległego typu Delta oraz opracowano koncepcję badań trwałościowych.
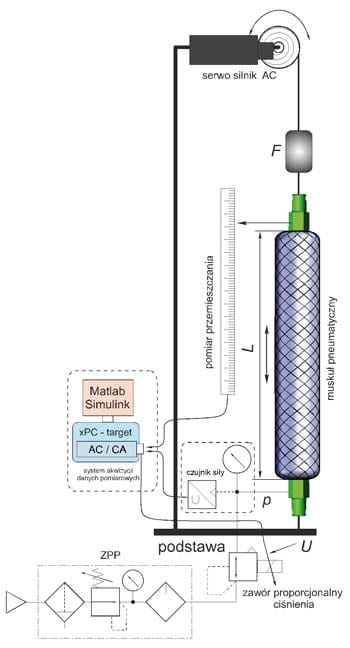
W celu przeprowadzenia badań opracowanej konstrukcji napędów mięśniowych zaprojektowano i wykonano stanowisko do badań trwałościowych przedstawione na rysunku 4.
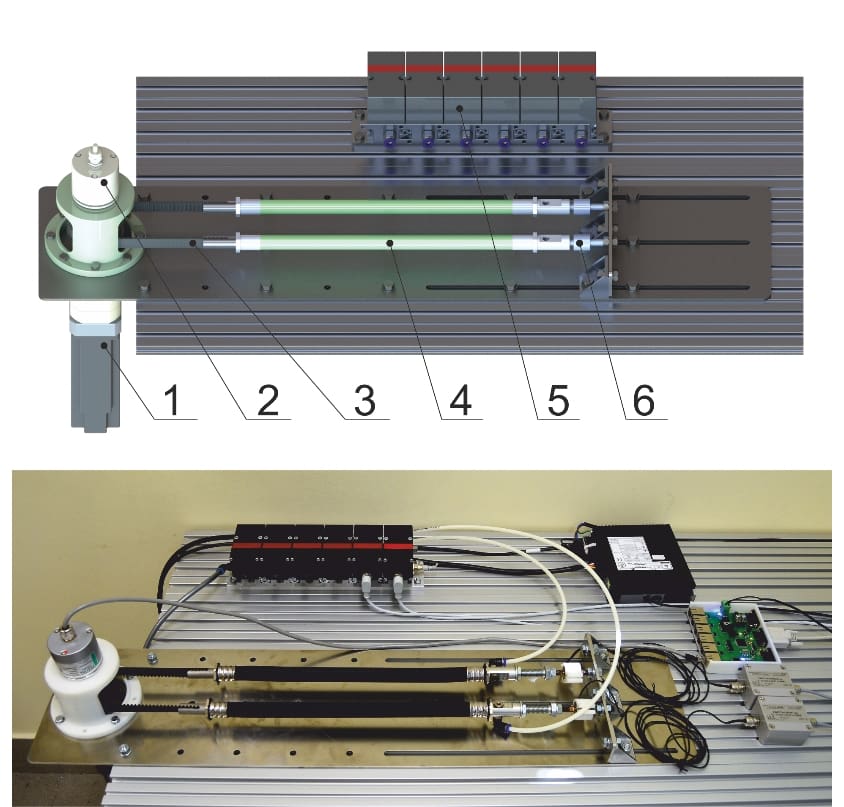
Ze względu na to, że opracowane i wykonane elastyczne napędy mięśniowe mają być częścią układu wykonawczego manipulatora przeprowadzono szerokie badania eksperymentalne.
W przedmiotowym napędzie elastycznym do zasilania muskułu w czynnik roboczy wykorzystano proporcjonalne piezoelektryczne serwozawory ciśnienia o nadciśnieniu wyjściowym 0-1 MPa i sygnale sterującym 0-10 V.
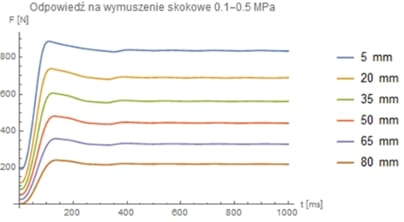
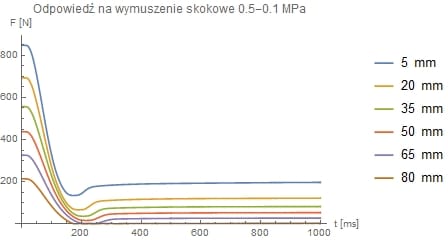
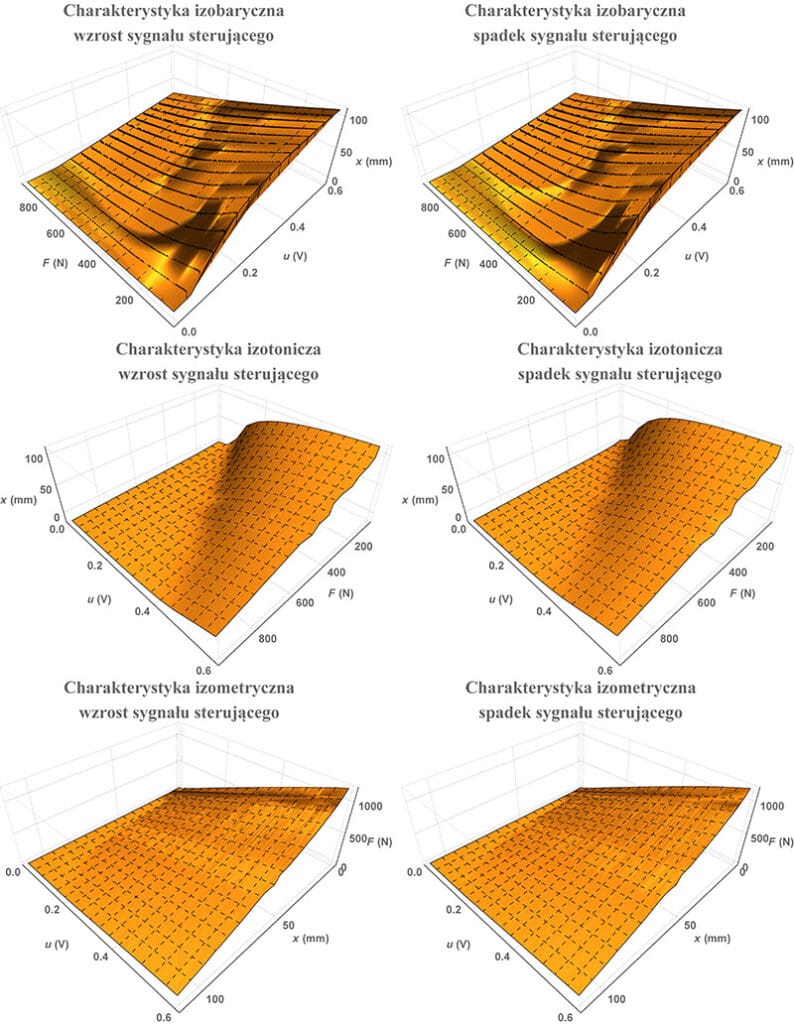
Wyznaczono charakterystyki statyczne i dynamiczne (Rys. 5) opracowanych napędów m.in. charakterystyki izobaryczne, izometryczne i izotoniczne (Rys. 6).
Na konstrukcję manipulatora składają się: elementy podstawy (ramy nośnej), ramiona czynne i bierne, przeguby, elementy napędowe, platforma robocza, kiść manipulacyjna, zindywidualizowane uchwyty, pozostałe elementy mechaniczne. Zaprojektowano autorskie układy kontroli i sterowania manipulatorem. Przeprowadzano ich implementację na mikrokontrolerach zawierających przetworniki AC i CA w języku programowania wysokiego poziomu. Opracowano autorskie oprogramowanie pozwalające na zapis i odtwarzanie zaprogramowanej przez rehabilitanta trajektorii ruchu, opartą na metodzie teach/playback.
Zaprojektowane urządzenie pozwala na prowadzenie przez rehabilitanta (lekarza) ręki pacjenta, z możliwością kontroli przestrzennej pozycji i orientacji, z równoczesną kontrolą sił oraz momentów (6-DoF). Procedura ta pozwala na wielokrotne powtarzanie zapisanej sekwencji ruchów z możliwością pogłębienia wskazanych przez rehabilitanta zakresów ruchu kończyny. W oprogramowaniu zapisywane są dane z indywidualnych sesji rehabilitacyjnych, z możliwością późniejszej ich analizy.
Podsumowanie
Charakterystyka manipulatora Delta 6-DoF, w tym kształt, wielkość przestrzeni roboczej, jak i zakres ruchów roboczych, zależy w dużym stopniu od parametrów struktury kinematycznej. Największy wpływ na kształt przestrzeni roboczej mają długości ramion i zakresy osi osiągane przez przeguby.


Zdaniem autorów wyniki prac konstrukcyjnych oraz badań doświadczalnych dają nadzieję, że w niedalekiej przyszłości taka możliwość wspomagania lekarzy w rehabilitacji osób niepełnosprawnych może stać się standardową procedurą medyczną.

Nawiązana współpraca w trakcie realizacji fazy K projektu z Świętokrzyskim Centrum Rehabilitacji w Czarnieckiej Górze pozwoliła na zaproszenie specjalistów rehabilitacji i prezentację wykonanej konstrukcji. Wskazano dalszy kierunek prac nad opracowanym manipulatorem, związany ze zwiększeniem funkcjonalności urządzenia poprzez dodanie możliwości rehabilitacji dłoni i nadgarstka (co wiąże się z następnymi pracami rozwojowymi).
Wykonawcami rozwiązań od strony naukowej są: mgr inż. Dawid Pietrala, mgr inż. Gabriel Bracha, mgr inż. Krzysztof Borkowski, dr inż. Sławomir Błasiak, dr Jakub Takosoglu, dr inż. Jarosław Zwierzchowski, prof. dr hab. inż. Dariusz Janecki. Opracowanie technologii oraz badania przemysłowe wykonane zostały przy znacznym udziale partnera przemysłowego Utech Technics Sp. z o.o. z Kielc.
dr inż. Paweł Andrzej Łaski
pawell@tu.kielce.pl
mgr inż. Dawid Pietrala
Politechnika Świętokrzyska
Wydział Mechatroniki i Budowy Maszyn
Prace badawcze zostały sfinansowane z projektu NCN i NCBiR TANGO numer TANGO1/270131/NCBR/2015.
Szczególne podziękowania dla pracowników Świętokrzyskiego Centrum Rehabilitacji w Czarnieckiej Górze za udzieloną pomoc i wsparcie swoim doświadczeniem.
artykuł pochodzi z wydania 4 (139) kwiecień 2019