









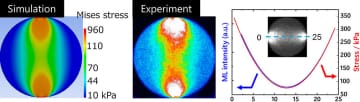























Do budowy sztucznych mięśni użyto silikonowej membrany, odlanej w taki sposób, by od spodu była pokryta porowatymi bąbelkami o średnicy 100 µm. Przy zanurzeniu w wodzie, w porach membrany uwięzione zostaje powietrze. Pod wpływem fali ultradźwiękowej, pęcherzyki powietrza zaczynają oscylować, doprowadzając do ruchu całej membrany. Rozmiar, kształt i rozmieszczenie bąbelków pozwala programować ruch, który może skutkować odginaniem się całej membrany bądź falowaniem jej powierzchni. Aktywacja przebiega bezprzewodowo, a czas reakcji membrany na sygnał mieści się w przedziale milisekund.
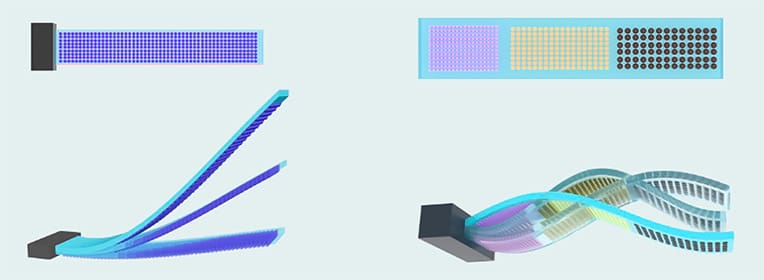
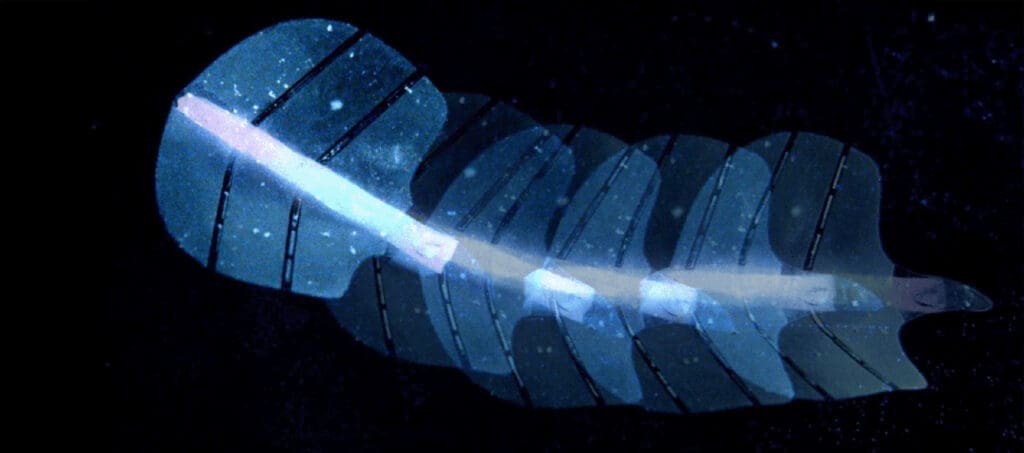
Działające na tej zasadzie sztuczne mięśnie użyto do budowy miniaturowych chwytaków, zdolnych do precyzyjnego manipulowania drobnymi obiektami. Zbudowano także robota o kształcie przypominającym rybę płaszczkę. W jego konstrukcji dwa sztuczne mięśnie pełnią funkcję płetw, a ich falowanie wprawia robota w ruch, umożliwiając pływanie pod wodą. Jak wyjaśnia prof. Daniel Ahmed z ETH, dowodzi to, że wzbudzona ultradźwiękami oscylacja pęcherzyków może generować nie tylko proste ruchy, lecz także bardziej złożone schematy kinematyczne, na podobieństwo organizmów żywych. Choć na razie przetestowane jedynie na bardzo prostych przykładach, tego typu sztuczne mięśnie budzą duże zainteresowanie, między innymi w medycynie.
ethz.ch
rwth-aachen.de










