W prowadzonych pracach badawczych podstawowym celem, który zamierzano osiągnąć, była poprawa właściwości napędowych pojazdów. Wynikało to w znacznym stopniu ze współpracy z konkretnymi partnerami przemysłowymi, zwłaszcza z Fabryką Samochodów Rolniczych w Poznaniu, opracowującą w tym okresie samochód dla wojska – Honker, oraz z przekonania (w początkowym okresie prac), że podstawowym zadaniem mechanizmu różnicowego jest zapewnienie dobrych cech trakcyjnych pojazdu.
Założenia konstrukcyjne i kierunek rozwoju mechanizmów różnicowych Problemem w procesie regulowania napędzania kół pojazdu jest wskazanie wielkości sterowanej. W zasadzie chodzi o regulowanie wartości siły napędowej i porównywanie jej z chwilową wartością siły przyczepności koła. Jednak ze względu na techniczne trudności pomiaru i porównywania wartości sił, zastępuje się to regulowaniem poślizgu koła, lub w przedstawionych dalej mechanizmach różnicowych, regulowaniem wartości wytypowanych wskaźników kinematycznych pracy mechanizmu różnicowego przez zmianę momentu tarcia wewnętrznego. Rozwiązania, w których jest realizowany ten ostatni rodzaj regulacji, mimo że nie we wszystkich warunkach prawidłowo rozdzielają siły napędowe, zostały wybrane jako kierunek prac badawczych. Przewidywano, że będą one miały niżej wymienione zalety:
- Uzależnienie wartości momentu tarcia wewnętrznego od parametrów kinematycznych ruchu elementów mechanizmu różnicowego umożliwia, w pewnym przybliżeniu, kontrolowanie współpracy kół napędowych z podłożem, czyli ograniczanie ich poślizgów.
- Parametry kinematyczne ruchu poszczególnych elementów są dostępnew obrębie mechanizmu różnicowego, co umożliwia zintegrowanie z nim regulatora i generatora momentu tarcia, pracujących bez zewnętrznego sterowania i zasilania.
- Uzależnienie wartości momentu tarcia od parametrów kinematycznych powoduje, że w większości warunków eksploatacji pojazdów stany pracy z powiększonym tarciem występować będą rzadko i krótkotrwale, co korzystnie wpłynie na sprawność przeniesienia napędu, kierowalność pojazdu i trwałość zespołu mechanizmu różnicowego.
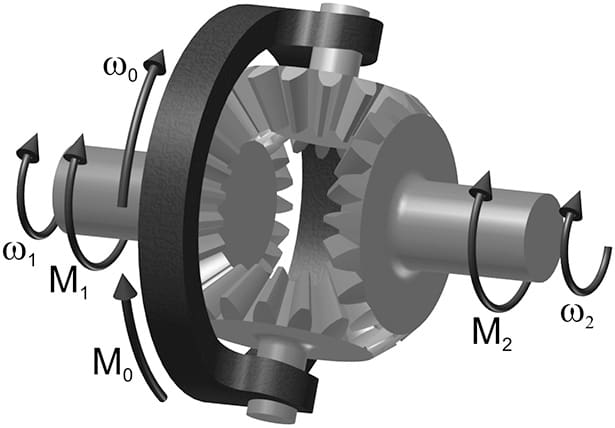
Jeżeli jako wskaźnik kinematyczny pracy mechanizmu różnicowego przyjąć stosunek prędkości kątowych ω1/ω0 lub ich różnicę Δω = |ω1 – ω0| = |ω2 – ω0| (oznaczenia prędkości według rysunku 1) to stosunkowo łatwo można zbudować mechanizm różnicowy działający z wykorzystanie tych parametrów, stosując typowy mechatroniczny schemat automatycznej regulacji [5, 6] (Rys. 2).

W podjętych pracach poszukiwawczych odrzucono jednak tę drogę i dążono do zrealizowania innych systemów regulacji momentu tarcia w mechanizmie różnicowym, bez stosowania standardowych czujników i podzespołów elektronicznych, ale z końcowym efektem jakościowo porównywalnym z działaniem typowych układów mechatronicznym.
Takie podejście pozwala również w inny sposób rozwiązać problem energii zasilającej moduł sterujący i zespół wykonawczy, aby zadanie regulacyjne mogło zostać wykonane. We współczesnych systemach regulacji dominują rozwiązania wykorzystujące doprowadzaną energię pomocniczą. Od wielu lat jestem zwolennikiem układów regulacji, które w swoim działaniu wykorzystują jedynie, bądź głównie, energię pobieraną od obiektu [2, 3, 4]. Taki pogląd, o celowości zrezygnowania z energii pomocniczej, znajduje szczególne uzasadnieniew przypadku obiektów typu mechanicznego, a takim jest mechanizm różnicowy. Korzyściami układów regulacji pracujących bez energii pomocniczej zwykle są: wyższa sprawność, wynikająca z braku poboru mocy przez układy zasilające, oraz możliwość zintegrowania układu z obiektem, i uproszczenie konstrukcji całego systemu.
Przedstawione powyżej podejście do budowy układu automatycznej regulacji, w dobie wszechobecnej elektroniki, może wydawać się archaiczne. Ale ten nurt automatyzowania wielu procesów ciągle jest praktykowany, a w budowie pojazdów przykładami mogą być regulatory luzu szczęka-bęben w hamulcach kół, amortyzatory samopoziomujące typu Nivomat, czy ostatnio zaprezentowane przez firmę Good Year opony samopompujące się z utrzymywaniem stałej wartości ciśnienia. Ostatecznie przyjęto następujące główne założenia konstrukcyjne i wymagania funkcjonalne konieczne do zrealizowania w poszukiwanym układzie sterowania momentem tarcia:
- poprawa zdolności napędowej przy znacznym poślizgu koła lewego lub prawego oraz kół przednich i tylnych,
- działanie przy jeździe do przodu i do tyłu,
- brak zasilania zewnętrznego,
- możliwie prosta konstrukcja i technologia wykonania,
- małe wymiary i masa,
- działanie niezależne od warunków otoczenia (temperatura, drgania),
- zdolność do przenoszenia dużych obciążeń i trwałość.
Wykorzystanie stosunku i różnicy prędkości kątowych członów mechanizmu różnicowego do sterowania momentem tarcia
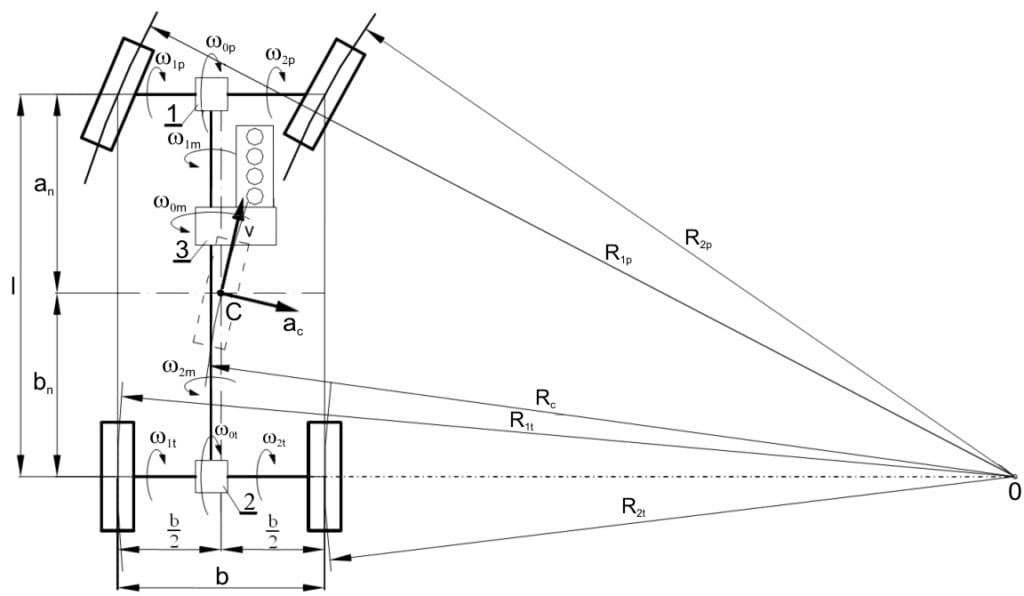
Zastanawiając się nad ruchem pojazdu kołowego łatwo dojść do wniosku, że w czasie jazdy krzywoliniowej koła będą się obracały z różną prędkością kątową oraz, że wzajemne relacje tych prędkości będą określone przez krzywiznę torów jazdy i cechy geometryczne pojazdu, takie jak rozstaw kół i osi. Oczywiście w takim wyobrażeniu zwykle zakłada się, że koła toczą się bez poślizgu obwodowego albo przy bardzo małej jego wartości. Natomiast, jeżeli wyobrazimy sobie sytuację, w której na skutek przekroczenia sił przyczepności niektóre koła napędowe pracują z dużym poślizgiem, wówczas trudno już oczekiwać zachowania określonych relacji ich prędkości kątowych. Tę cechę, przekraczania wartości takich wskaźników, jak stosunek lub różnica prędkości kątowych w warunkach znacznego poślizgu kół napędzanych, postanowiono wykorzystać do sterowania pracą mechanizmu różnicowego, a ściśle wartością jego momentu tarcia wewnętrznego. Analizy kinematyki ruchu elementów mechanizmu różnicowego w powiązaniu z ruchem pojazdu były już wykonywane w wielu pracach [1, 7, 8]. W pracach własnych [3, 4] wykonałem analizy, których celem było wykazanie przydatności wytypowanych wskaźników kinematycznych do sterowania momentem tarcia wewnętrznego w mechanizmie różnicowym. W artykule przywołane są one bardzo skrótowo i w stopniu, jaki jest niezbędny do lepszego zrozumienia koncepcji zaproponowanych mechanizmów różnicowych. W celu określenia zakresów zmienności parametrów ω1/ω0 i Δω posłużono się uproszczoną analizą kinematyki układu napędowego (Rys. 3). Przyjęto, że pojazd jest czterokołowy, porusza się po płaskiej jezdni, koła toczą się bez poślizgu i znoszenia bocznego oraz, że ich promienie kinetyczne są równe.
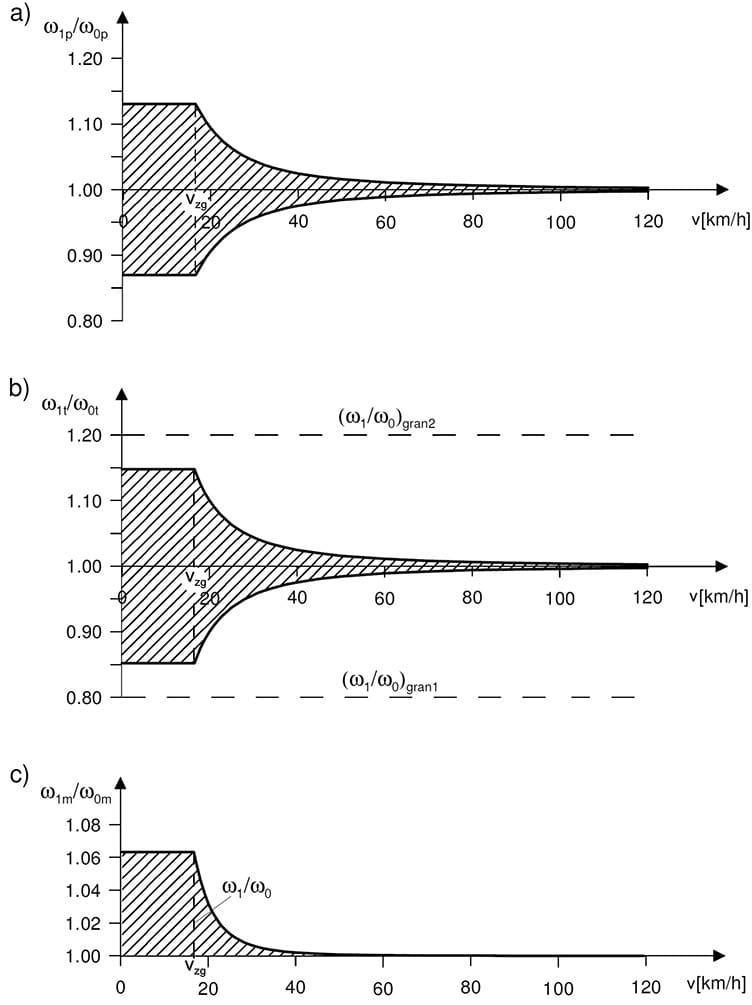
Dla każdego toru jazdy w ruchu pojazdu z określoną prędkością można wyznaczyć prędkości kątowe kół wykorzystując proporcje promieni łuków torów kół R1p, R2p, R1t, R2t, a dalej wartości parametrów ω1/ω0 i Δω. Aby wyznaczyć przebiegi funkcji ω1/ω0 = f(v) i Δω = f(v) i ich graniczne wartości dla trzech mechanizmów różnicowych należy określić ich cechy geometryczne (symetryczny lub niesymetryczny), przyjąć maksymalną wartość przyspieszenia dośrodkowego acmax działającego na środek masy w eksploatacji oraz uwzględnić, że samochód ma konstrukcyjnie określony minimalny promień skrętu. Obliczone zakresy zmienności parametru ω1/ω0 dla trzech symetrycznych mechanizmów różnicowych przykładowego samochodu terenowego z napędem typu 4×4 o masie 2500 kg, przy założonej wartości maksymalnego przyspieszenia dośrodkowego acmax = 0,35 g, są przedstawione na wykresach rysunków 4 a, b i c.
Podobnie wyznaczono zakresy zmienności parametru Δω dla mechanizmów różnicowych tego samego przykładowego samochodu (Rys. 5 a, b i c).
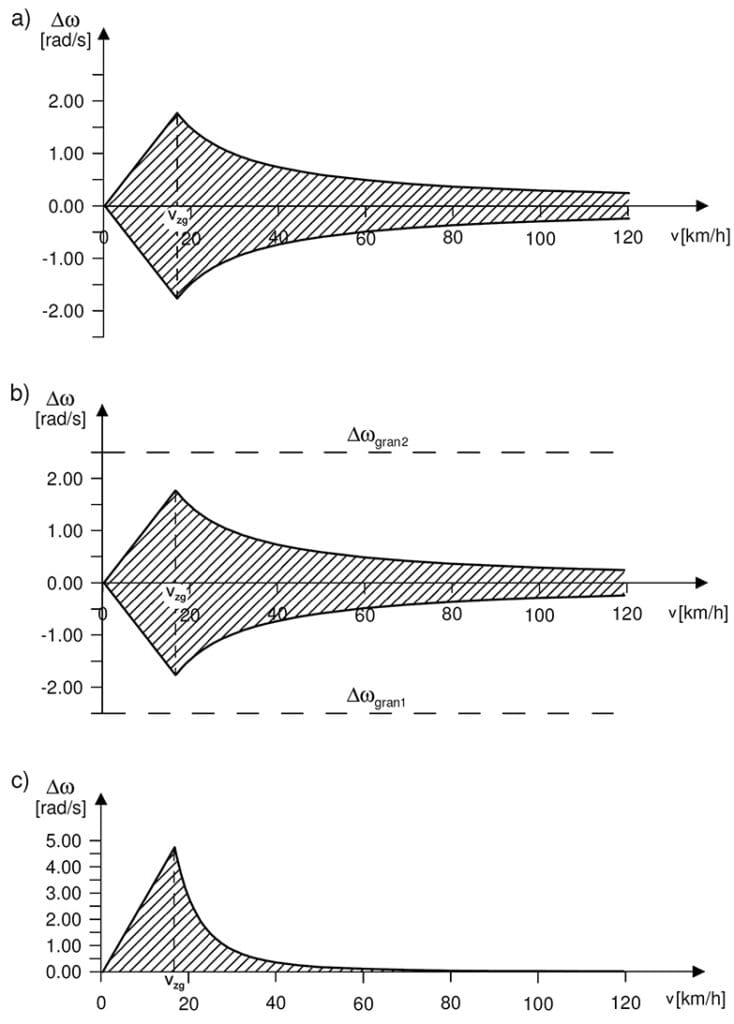
Analizując przedstawione wykresy można zauważyć, że:
- zakresy zmienności ω1/ω0 w mechanizmach różnicowych mostów napędowych są większe niż w międzyosiowym mechanizmie różnicowym,
- zakresy zmienności Δω w mechanizmach różnicowych mostów napędowych są mniejsze niż w międzyosiowym mechanizmie różnicowym,
- w międzyosiowym mechanizmie różnicowym występują jednostronne zakresy zmienności parametrów ω1/ω0 i Δω (przy poczynionych założeniach, tylko wał napędzający koła przednie może się kręcić szybciej od obudowy międzyosiowego mechanizmu różnicowego).
Oczywiście należy pamiętać, że otrzymane wyniki, ze względu na poczynione założenia upraszczające, stanowią tylko pewne przybliżenie, w stosunku do wartości rzeczywiście występujących w eksploatacji pojazdów. Jednak przedstawiona analiza, w początkowym okresie prac badawczych, dała wystarczająco dokładne informacje do przyjęcia parametrów układów sterowania w tworzonych koncepcjach i konstrukcjach mechanizmów różnicowych. Na jej podstawie przyjęto wartości graniczne (ω1/ω0)gran1,2 i Δωgran1,2, których osiągnięcie, w konkretnym mechanizmie różnicowym pojazdu, jest traktowane jako informacja o wystąpieniu dużego poślizgu wzdłużnego koła lub kół napędowych i powoduje wytworzenie momentu tarcia wewnętrznego. Takie przykładowe graniczne wartości w postaci linii przerywanych naniesiono na rysunkach 4b i 5b. Pewne ich oddalenie od wyznaczonych zakresów zmienności ω1/ω0 i Δω wynika z chęci uniknięcia przedwczesnego lub przypadkowego zadziałania regulatora na skutek wystąpienia innych czynników niż poślizg koła, wpływających na śledzone parametry. Czynnikami tymi mogą być, na przykład nierówności nawierzchni drogi oraz różne wartości promieni kinetycznych kół spowodowane nierównym zużyciem bieżnika lub ciśnieniem w ogumieniu.
Wykonano również analizę porównawczą sterowania mechanizmów różnicowych z użyciem parametrów ω1/ω0 i Δω. Wnioski wynikające z takiej analizy, tylko dla mechanizmu różnicowego tylnego mostu napędowego, można uogólnić i sformułować następująco:
- sterowanie mechanizmu różnicowego parametrem Δω dopuszcza występowanie poślizgu o wartości 100% w fazie ruszania samochodu,
- w zakresie małych prędkości jazdy sterowanie z użyciem parametru ω1/ω0, zapewnia mniejszy poślizg koła mającego gorszą przyczepność,
- w zakresie większych prędkości jazdy sterowanie z użyciem parametru Δω zapewnia mniejszy poślizg koła o mniejszej sile przyczepności.
Obszerniejsze analizy zmienności parametrów ω1/ω0 i Δω i możliwości ich wykorzystania do sterowania pracą mechanizmów różnicowych zostały przedstawione w literaturze [4].
Nowe koncepcje mechanizmów różnicowych, ich opracowania konstrukcyjne i badania doświadczalne
Przystępując do realizacji przedstawionej idei mechanizmów różnicowych o momencie tarcia wewnętrznego sterowanym parametrami kinematycznymi, starałem się zrealizować wcześniej wymienione założenia i wymagania. Oczywiście, zgodnie z przyjętą ogólną ideą, staraliśmy się głównie budować rozwiązania, w których moment tarcia wewnętrznego byłby sterowany mechanicznym regulatorem zintegrowanym z mechanizmem różnicowym. Niemniej opracowano również konstrukcje, w których odstąpiono od tej zasady i dopuszczono sterowanie sygnałem zewnętrznym, jednak utrzymano pewne pokrewieństwo konstrukcyjne i zachowanie zalet własnych rozwiązań z całkowicie mechanicznymi układami sterowania. Jako ważne cechy wymagane, chociaż konieczne do osiągnięcia dopiero w końcowym okresie rozwoju konstrukcji, przyjęto niezawodność działania i trwałość mechanizmów w odpowiednio długim okresie eksploatacji. Te docelowe warunki również były uwzględniane już w fazie początkowych analiz i wpływały na wybór koncepcji działania mechanizmu.
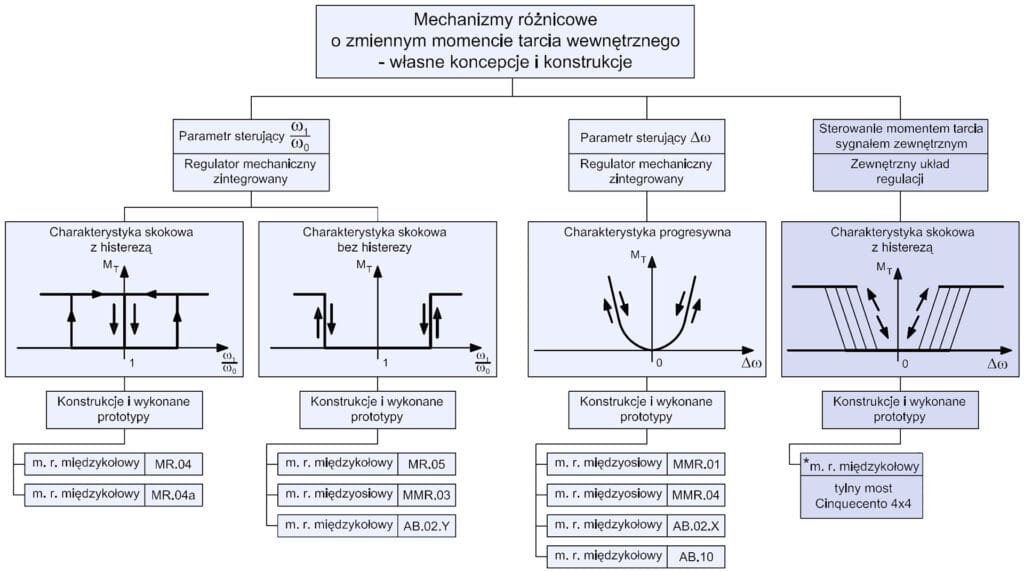
Pewien obraz prac badawczych, wykonanych w dość długim, bo około dwudziestoletnim okresie (lata 1980-2000) daje zestawienie przedstawione na rysunku 6. Obejmuje ono moje najważniejsze koncepcje oraz zaprojektowane i przebadane mechanizmy różnicowe o sterowanym momencie tarcia wewnętrznego. Wyodrębniono cztery zasadnicze grupy rozwiązań, zamieszczając ich uproszczone charakterystyki działania. Ogólne nowe koncepcje mechanizmów różnicowych obejmują, prawie zawsze, wielotarczowe sprzęgło cierne i mechaniczny regulator sterujący wartością jego momentu tarcia. Wartość momentu tarcia regulator uzależnia od wartości stosunku ω1/ω0 lub różnicy prędkości kątowych Δω. Właśnie wybór tych parametrów i zastosowanie mechanicznych regulatorów zawierających oryginalne czujniki parametrów ω1/ω0 lub Δω jest nowością w proponowanych rozwiązaniach.
Wracając do wcześniej sygnalizowanych wątpliwości co do wyboru mechanicznej zasady działania regulatorów, aktualnie raczej odrzucanej, można za literaturą dotyczącą urządzeń i systemów automatycznych wymienić wady i zalety takich układów. Do wad mechanicznych systemów zalicza się trudności w przekazywaniu sygnałów (i energii wykonawczej) na dalsze odległości, konieczność smarowania i wykonywania czynności regulacyjnych oraz możliwość realizowania tylko stosunkowo prostych algorytmów sterowania. Jednak ważne wydają się również przytaczane zalety, a mianowicie: łatwość realizacji zadań mechanicznych bez dodatkowych przetworników energii, duża moc i trwałość, mały ciężar członów wykonawczych oraz niewielki wpływ temperatury na działanie układu. Zalety te oraz moje preferencje i przekonanie o możliwości zbudowania regulatorów o nowych, bardziej złożonych algorytmach sterowania, wpłynęły na wybór tej drogi realizacji automatycznego sterowania działaniem mechanizmów różnicowych.
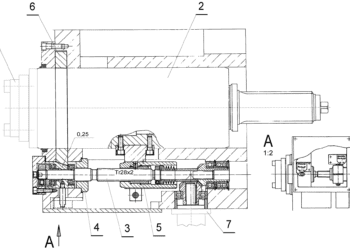
Widoki ważniejszych konstrukcji mechanizmów różnicowych przedstawiono na rysunkach 7 i 8. Rysunek 7 zawiera prototypowe mechanizmy różnicowe opracowane do wojskowych samochodów Honker 4×4 i w nich badane. Poszczególne rzędy fotografii przedstawiają odpowiednio różne typy prototypowych mechanizmów do przedniego mostu napędowego, międzyosiowe i do tylnego mostu. Umieszczone przy symbolach typu oznaczenia (ω1/ω0) lub (Δω) określają, który parametr jest wykorzystywany do sterowania momentem tarcia wewnętrznego. Podobnie na rysunku 8 przedstawiono widoki mechanizmów różnicowych do tylnych mostów napędowych samochodu Polonez i prototypowego samochodu Cinquecento 4×4.
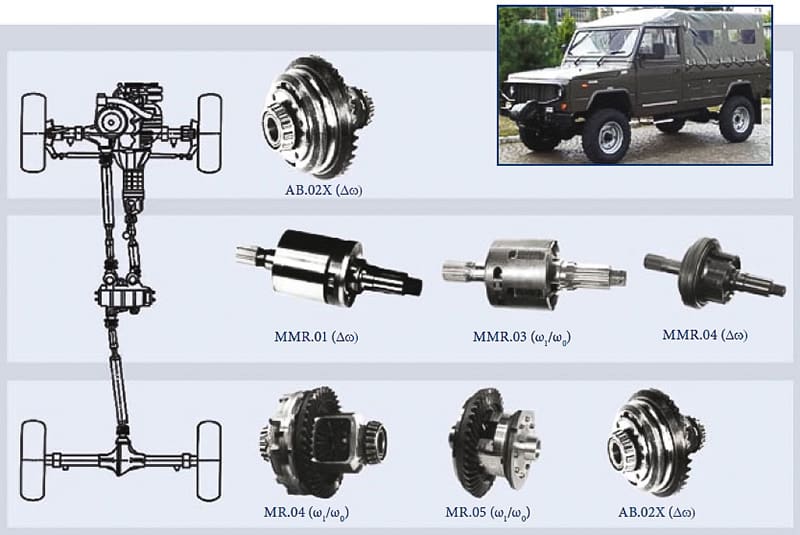

Bliższe zaprezentowanie zasad działania, konstrukcji i uzyskanych wyników badań doświadczalnych poszczególnych konstrukcji będzie przedmiotem odrębnych publikacji. Wyprzedzająco można tylko powiedzieć, że w większości przypadków zaproponowane mechanizmy różnicowe potwierdziły oczekiwane zalety, w tym znacznie poprawiając zdolność poruszania się badanych pojazdów w trudnych warunkach. Badania doświadczalne na dużej liczbie prototypów były wykonywane w kilku niezależnych jednostkach badawczych w kraju, a w jednym przypadku również we Włoszech. Rysunek 9 przedstawia samochód doświadczalny Tarpan Honker 4×4 z prototypowymi mechanizmami różnicowymi, w czasie takich badań.

dr hab. inż. Jan Dzida
Literatura:
[1] Dębicki M.: Teoria samochodu – teoria napędu. WNT, Warszawa, 1971.
[2] Dzida J.: Koncepcja konstrukcji członów wykonawczych do układów automatycznego sterowania zespołami samochodu. VII Międzynarodowe Sympozjum IPM WAT nt. Doskonalenie konstrukcji oraz metod eksploatacji pojazdów mechanicznych, Warszawa-Rynia, 1999.
[3] Dzida J.: Mechanizmy różnicowe sterowane regulatorami mechanicznymi reagującymi na parametry kinematyczne. Archiwum Motoryzacji, nr 3, 2007.
[4] Dzida J.: Mechanizmy rozdziału mocy w pojazdach. Rozprawa habilitacyjna. Wydawnictwo Akademii Techniczno-Humanistycznej, Bielsko-Biała, 2010.
[5] Gajek A., Juda Z.: Mechatronika samochodowa – Czujniki. WKŁ, Warszawa, 2008.
[6] Herner A., Riehl H.: Elektrotechnika i elektronika w pojazdach samochodowych. WKŁ, Warszawa, 2009.
[7] Jaśkiewicz Z.: Mosty napędowe. WKŁ, Warszawa 1977.
[8] Lanzendorfer J., Szczepaniak C.: Teoria ruchu samochodu. WKŁ, Warszawa 1980.
artykuł pochodzi z wydania 9 (60) wrzesień 2012